热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


均值滤波器可以归为低通滤波器,是一种线性滤波器,其输出为邻域模板内的像素的简单平均值,主要用于图像的模糊和降噪。
均值滤波器的概念非常的直观,使用滤波器窗口内的像素的平均灰度值代替图像中的像素值,这样的结果就是降低图像中的“尖锐”变化。这就造成,均值滤波器可以降低噪声的同时,也会模糊图像的边缘。均值滤波器的处理结果是过滤掉图像中的“不相关”细节,其中“不相关”细节指的是:与滤波器模板尺寸相比较小的像素区域。
根据均值计算方法的不同,均值滤波器有以下几种:
•算术均值滤波器
•几何均值滤波器
•谐波均值滤波器
•逆谐波均值滤波器
算术均值滤波器 Arithmetic Mean Filter
这是最简单的均值滤波器,可以去除均匀噪声和高斯噪声,但会对图像造成一定程度的模糊。
令 表示中心点在
表示中心点在 处,大小为
处,大小为 的滤波器窗口。算术均值滤波器就是简单的计算窗口区域的像素均值,然后将均值赋值给窗口中心点处的像素:
的滤波器窗口。算术均值滤波器就是简单的计算窗口区域的像素均值,然后将均值赋值给窗口中心点处的像素:
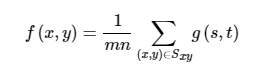
其中, 表示原始图像,
表示原始图像, 表示均值滤波后得到的图像。
表示均值滤波后得到的图像。
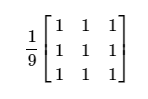
基于上述公式,可以很容易的得到的算术均值滤波器的窗口模板,下面以3×3为例
在OpenCV中,函数blur表示使用该模板的均值滤波器,其声明如下:
void blur( InputArray src, OutputArray dst,
Size ksize, Point anchor = Point(-1,-1),
int borderType = BORDER_DEFAULT );src是输入图像,dst为输出图像;ksize是滤波器模板窗口的大小;后两个参数分别表示,待处理像素在模板窗口的位置,默认值是窗口的中心位置,所以窗口的大小一般为奇数,最后一个参数表示对编解类型的处理,使用默认值即可。其调用示例blur(src,dst,Size(5,5),模板窗口的大小为5×5。
盒状滤波器
当滤波器的模板的所有的系数都相等时称之为盒状滤波器 Box Filter。其使用的模板如下(3×3 为例):

当 时,盒状滤波器可以很方便的计算图像像素邻域的和,对计算图像的各种积分特性例如图像的协方差矩阵,是很有帮助的。OpenCV中的函数boxFilter就是盒状滤波器,其声明如下:
时,盒状滤波器可以很方便的计算图像像素邻域的和,对计算图像的各种积分特性例如图像的协方差矩阵,是很有帮助的。OpenCV中的函数boxFilter就是盒状滤波器,其声明如下:
void boxFilter( InputArray src, OutputArray dst, int ddepth,
Size ksize, Point anchor = Point(-1,-1),
bool normalize = true,
int borderType = BORDER_DEFAULT );和blur的参数比较类似,所不同的ddepth是滤波后图像的深度,-1表示和原图像的深度相同;参数normalize表示是否有归一化的参数,这是因为在boxFilter使用的模板如下:
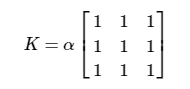
其中,
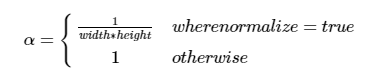
也就是说,当normalize = true时,这也是一个默认值,其就是一个算术均值滤波器;normalize=false,盒状滤波器的作用就是计算模板窗口内的像素的和,然后将值赋给窗口中心位置的像素,主要用来计算邻域像素的和。
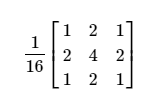
加权的均值滤波器
不同于上面的所有像素的系数都是相同的,加权的均值滤波器使用的模板系数,会根据像素和窗口中心像素的距离而取不同的系数。赋予中心点最高的权重,然后随着离中心点的距离增加而减小系数,这样做的目的是在平滑图像的同时尽量降低对图像的模糊。最常用的加权模板如下(3×3)为例:
其他的一些非线性均值滤波器
除了上述算术均值滤波器,根据计算均值方法的不同还有几种均值滤波。
几何均值滤波器 Geometric Mean Filter其公式如下:
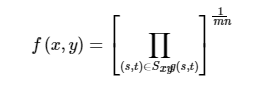
滤波后图像的像素由模板窗口内像素的乘积的 幂给出。 和算术均值滤波器相比,几何均值滤波器能够更好的取出高斯噪声,并且能够更多的保留图像的边缘信息。但,其对0值是非常敏感的,在滤波器的窗口内只要有一个像素的灰度值为0,就会造成滤波器的输出结果为0。
幂给出。 和算术均值滤波器相比,几何均值滤波器能够更好的取出高斯噪声,并且能够更多的保留图像的边缘信息。但,其对0值是非常敏感的,在滤波器的窗口内只要有一个像素的灰度值为0,就会造成滤波器的输出结果为0。
谐波均值滤波器 Harmonic Mean Filter 其公式如下:

谐波均值滤波器对盐粒噪声(白噪声)效果较好,不适用于胡椒噪声;比较适合处理高斯噪声。
逆谐波均值滤波器 Contra-Harmonic Mean Filter其公式如下:
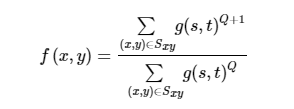
其中Q称为滤波器的阶数,该滤波器可以用来消除椒盐噪声。但是需要不同同时处理盐粒噪声和胡椒噪声,当Q为正时,可以消除胡椒噪声;当Q为负时,消除盐粒噪声。当Q=0时,该滤波器退化为算术均值滤波器;Q=-1时,退化为谐波均值滤波器。
 均值滤波器 非线性均值滤波器中的一种,其公式如下:
均值滤波器 非线性均值滤波器中的一种,其公式如下:

P为负数时可以有效的滤去盐粒(白)噪声,正的异常值;P为正时可以过滤胡椒(黑)噪声,负的异常值。
基于OpenCV的实现
上述滤波器的实现大同小异,只是计算均值的方法不同。
Mat tmp;
copyMakeBorder(m, tmp, ksize / 2, ksize / 2, ksize / 2, ksize / 2, BorderTypes::BORDER_REFLECT); // 扩展边界
int rows = tmp.rows - ksize / 2;
int cols = (tmp.cols - ksize / 2) * tmp.channels();
for (int i = ksize / 2; i < rows - ksize / 2; i++)
{
for (int j = ksize / 2; j < cols - ksize / 2; j++)
{
// 遍历窗口内的像素,计算均值
}
}
Rect rect(ksize / 2, ksize / 2, m.cols, m.rows);
m = tmp(rect);下面就不再贴全的代码,只给出根据不同的公式计算均值的代码。
几何均值滤波器
// 取得窗口像素
double mul = 1;
for (int a = -ksize / 2; a <= ksize / 2; a++)
{
for (int b = -ksize / 2; b <= ksize / 2; b++)
{
mul *= tmp.at(i + a, j + b);
}
}
auto pixel = pow(mul, 1.0 / (ksize * ksize));
if (pixel < 0)
pixel = 0;
else if (pixel >= 255)
pixel = 255;
tmp.at(i, j) = static_cast(pixel); 基本就是遍历图像的像素,然后在滤波器的窗口内根据均值的计算方式计算均值;几何滤波器,就是将滤波器窗口内的像素乘积,然后去乘积的 幂。需要说明的是:几何均值滤波器有个致命的缺陷,那就是当窗口内像素只要有一个值为0,则其计算得到的值就是0,这在去去噪时表现的比较明显,例如:
幂。需要说明的是:几何均值滤波器有个致命的缺陷,那就是当窗口内像素只要有一个值为0,则其计算得到的值就是0,这在去去噪时表现的比较明显,例如:

由于噪声的污染比较严重,在使用几何均值滤波器去噪时,会得到一块黑色区域(灰度值为0)。
加权的均值滤波器
// 取得窗口像素
int sum = 0;
int weightSum = 0;
for (int a = -ksize / 2; a <= ksize / 2; a++)
{
for (int b = -ksize / 2; b <= ksize / 2; b++)
{
auto weight = pow(2, ksize - abs(a) - abs(b) - 1);
weightSum += weight;
sum += weight * tmp.at(i + a, j + b);
}
}
auto pixel = static_cast<int>(sum / weightSum);
if (pixel < 0)
pixel = 0;
else if (pixel > 255)
pixel = 255;
tmp.at(i,j) = pixel; 主要是权值系数的计算,可以发现一定的关系,和中心越近的其权值越高,具体公式: ,其中
,其中 为和中心在
为和中心在 方向的距离。
方向的距离。
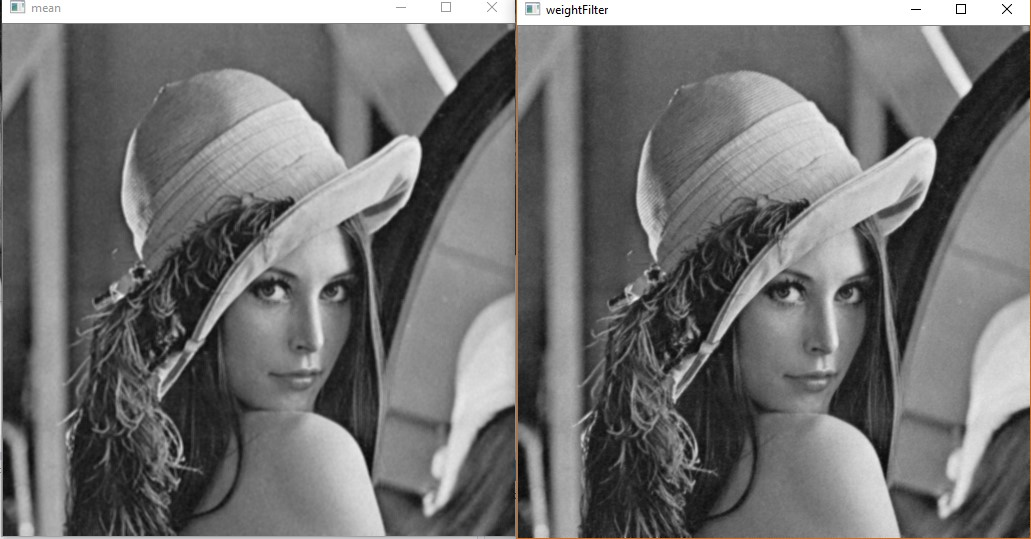
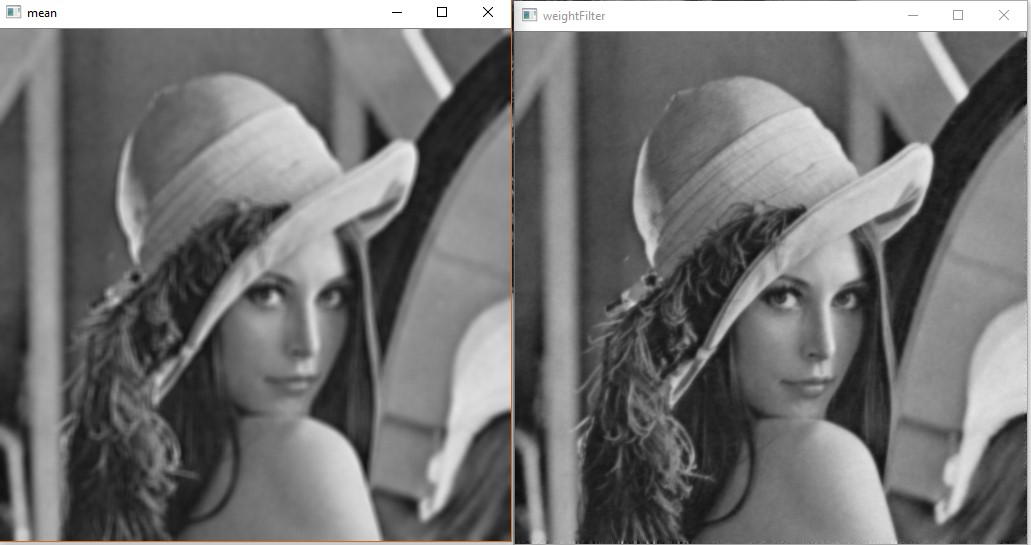
加权的均值滤波器去噪效果和均值滤波器相当,但是在保护图像细节方面比均值滤波器效果要好,上图是3×3的滤波器,窗口较小,两者的区别不是较大。
下图是7×7的滤波器,对比就比较明显了。
至于,其他的几种:谐波滤波器、逆谐波滤波器和 均值滤波器,实现都差不多,代码就不再贴出了。
均值滤波器,实现都差不多,代码就不再贴出了。
总结
均值滤波器能够去除均匀分布和高斯分布的噪声,但是在过滤掉噪声的同时,会对图像造成一定的模糊,使用的窗口越大,造成的模糊也就越明显。
根据计算均值方法的不同,有多种均值滤波,经常使用的是算术均值滤波器,计算简单,但是对图像造成的模糊交明显;另外,有加权的均值滤波器,给窗口内的像素不同的系数,距离中心越近则系数越大。
使用加权的均值滤波器,去除噪声的能力和算术均值滤波器相当,但是对图像造成的模糊较轻,能够更好的保护图像的细节。(上面已有对比)
几何均值滤波器,在过滤噪声的同时也能更好的保护图像的细节,但是有个缺陷:在滤波的过程中,窗口内的像素只要有一个为0,则其得出的值就是0.
至于余下的几种,在能够去除高斯噪声,并且对椒盐噪声也有一定的作用,具体如下:
•谐波均值滤波器 能过滤盐粒噪声,对胡椒噪声无效
•逆谐波均值滤波器,当阶数Q为正时,可以过滤胡椒噪声;Q为负时可以过滤盐粒噪声。不能同时对椒盐噪声起作用。
•  均值滤波器, 和逆谐波均值滤波器类似。当P为正时,能够过滤椒盐噪声;P为负时,能够过滤盐粒噪声。
均值滤波器, 和逆谐波均值滤波器类似。当P为正时,能够过滤椒盐噪声;P为负时,能够过滤盐粒噪声。
文章转自Brook_icv https://www.cnblogs.com/wangguchangqing/p/6399293.html
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
