

热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
背景
在工业应用中,使用面阵相机识别传送带上的物体,当要识别的目标的最小包围矩形(不是最小包围旋转矩形)小于相机视野时,可以进行后续处理。但是当要识别的目标很大,比如超长的物体,如果还使用面阵相机,有两种办法,一种是硬件改进,另一种是软件改进。硬件改进就是在传送带运动方向均布多个面阵相机,通过同步触发同时采集图片,然后根据事先标定好的相机相对位置进行拼接。软件改进需要对传送带上的视频流进行处理,拼接出比较大的视野。
解决方法
一般在工业上会采用硬件改进的方法。当需要提高视觉识别的精度或者范围时,会采用多个相机图像进行拼接的办法。但是在实验室,我们可以尝试使用软件的方法来解决。
解决这个问题的关键是图片的拼接,而图像的拼接需要图像中有明显的特征点。而目标上是否有特征点我们不能控制,所以需要事先在传送带上布置特征点。
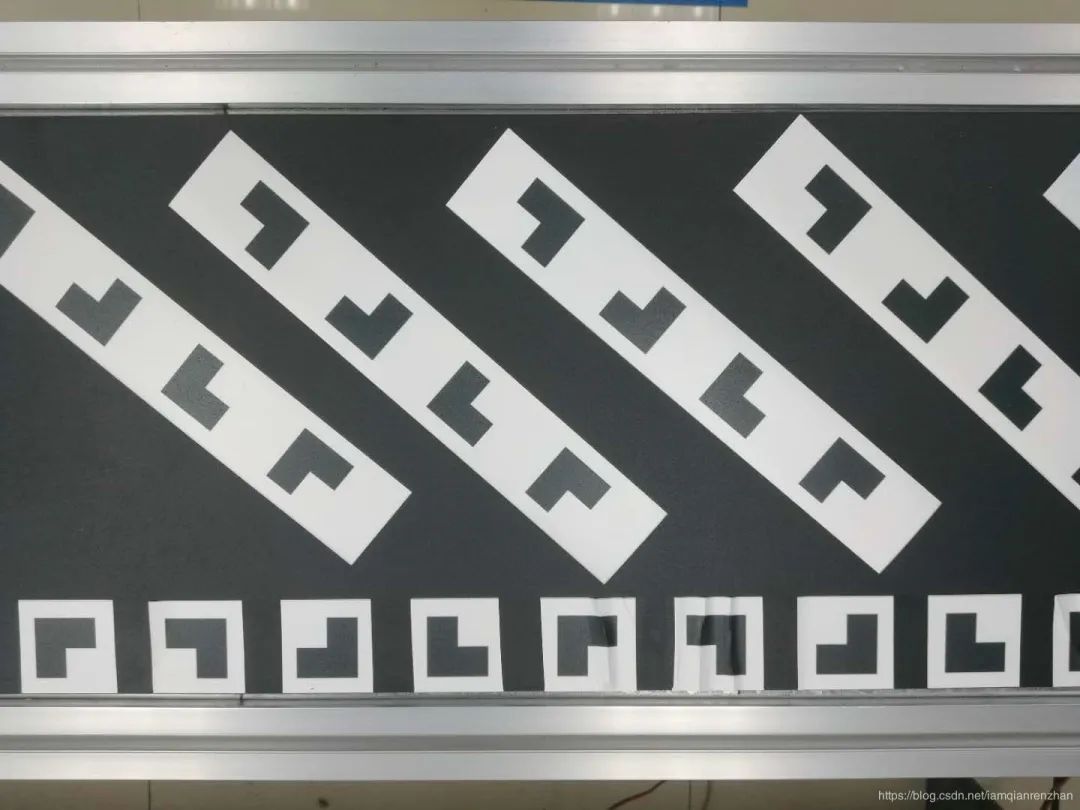
传送带上只有平移,所有对于图像拼接的3个参数x,y和θ,只需要计算x,如果相机成像平面和传送带平面不平行,需要先做一个透视变换。
特征的设计及摆放考虑如下:容易识别,编码容量不需太大,循环布置。

原始视频
以下是在传送带运动时采集到的视频:
拼接结果

算法原理
第一步:从视频流中提取一帧图像,作为关键帧,转到第2步。
第二步:提取下一帧,根据识别到靶标计算该帧图像和当前关键帧平移距离x1,如果x1约等于
0.4倍的视频运动方向图像像素,则把这一帧作为次关键帧,转到第三步,否则重复第二步。
第三步:提取下一帧,根据识别到靶标计算该帧图像和当前次关键帧平移距离x2,如果x1+x2 约等于
0.8倍的视频运动方向图像像素,则把当前帧作为新的关键帧,转到第二步,否则重复第三步。
在2、3步循环的时候,把所有关键帧按照顺序,根据当时的平移距离x1+x2进行拼接就得到一幅长图。当然也可以实时输出关键帧和对应的x1+x2。这样,在高层算法开发时,可以认为这是一个帧触发信号有点波动(由于帧率和传送带运动速度的不确定性,x1+x2不是固定值)的线阵相机。这也相当于做了一个中间层,屏蔽了底层的硬件细节,使得原本为线阵相机开发的算法也可以用在面阵相机上。
深圳市双翌光电科技有限公司是专注于视觉系统及机器视觉部件研发、生产和营销的高科技企业,是专业的机器视觉核心部件及解决方案提供商。双翌视觉坚守“持续创新”的理念,目前已经成功在消费电子、新能源、半导体、汽车、物流、交通、医药、科研等行业为客户提供优质的产品和定制化的视觉解决方案。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
