热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


在日常生活中,经常会遇到各种“反光”现象,使得我们在观察事物或摄影时有一定的障碍。比如:观赏水中的动植物时,水面上常常会有一道道光斑影响视线;阳光充足的柏油路面上,时常会有耀眼的强光射入司机的眼睛……相应地,在机器视觉中,我们也会经常遇到类似的情况:由于工件表面上的喷漆、镀膜、玻璃、包装膜或其它反光材质的影响,工业相机无法顺利采集到高质量的图像。因图像的对比度较低或者关键特征无法完整呈现,经常会导致机器视觉系统中误检、误判、精度低、不稳定等现象的发生,甚至是输出错误的数据。然而,这些问题我们是可以利用光的偏振特性得以解决的。
一、偏振基础原理
1. 偏振光介绍
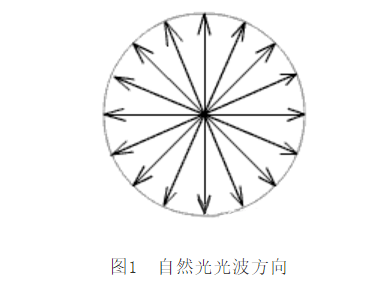
偏振是指横波的振动矢量(垂直于波的传播方向)偏于某些方向的现象,光的偏振现象是由法国工程师马吕斯于1808年发现的。众所周知,自然光是一种电磁波,属于横波,其在垂直于传播方向的平面内包含着一切可能方向的振动,且平均而言在任一方向上都具有相同的振幅,即振动方向是对称的,如图1所示。然而,当光的振动方向对于传播方向不对称性时,便成了偏振光。偏振现象横波区别于其他纵波的一个最明显的标志。
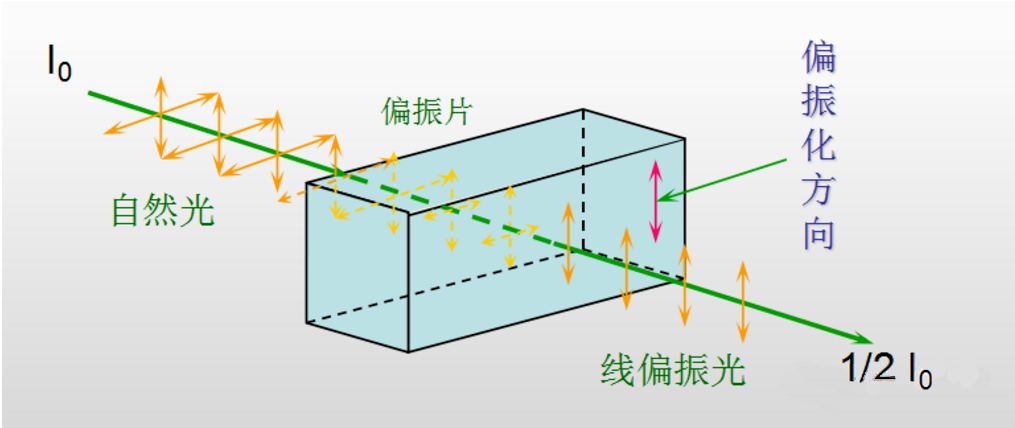
偏振光按其性质可分为平面偏振光(或线偏振光),圆偏振光,椭圆偏振光和部分偏正光。例如,自然光在传播过程中经过某种介质(偏振片)后,只有一个固定振动方向的光能够通过这个介质,就得到了线偏振光。线偏振光的振动方向是确定的,如图2所示。
为了更好地理解光的偏振现象,我们可以借助实验装置进行生动地阐述。在图3、图4中,P1(起偏器)、P2(检偏器)是两块同样的偏振片。在图3中,自然光(如灯光或阳光)通过偏振片P1后,形成了偏振光。但由于人的眼睛没有辨别偏振光的能力,故无法察觉。
如果我们把偏振片P1的方位固定,而把偏振片P2缓慢地转动,就可发现透射光的强度随着P2转动而出现周期性的变化,而且每转过90°就会重复出现发光强度从最大逐渐减弱到最暗。继续转动P2则光强又从接近于零逐渐增强到最大。由此可知,通过P1的透射光与原来的入射光性质是有所不同的,这说明经P1的透射光的振动对传播方向不具有对称性。图3中偏振光通过旋转的检偏器P2,光强发生变化,在P2平行于线偏振光方向时,光强最大;图4中在P2垂直于线偏振光方向时,光强几乎为零。
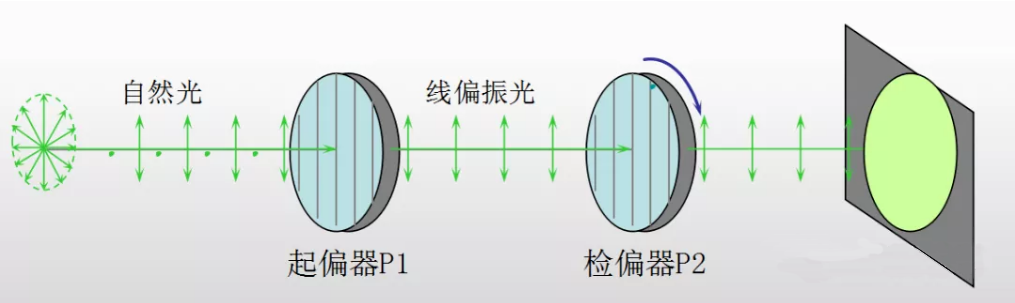
图3 P2方向与线偏振光方向水平
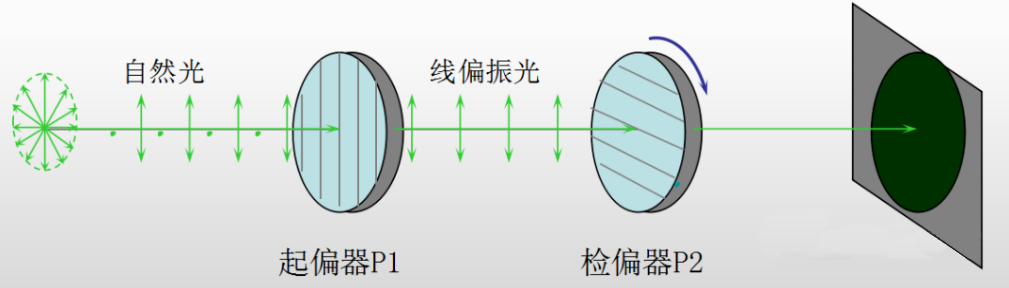
图4 P2方向与线偏振光方向垂直
将光的偏振特性运用于机器视觉光源中,通过合理的设计改变光源所发射光波的振动方向,同时约束反射回相机的光波的振动方向,便可消除机器视觉中常见的强反光现象。偏光光源由此产生。
2、偏振光源光路原理
2.1偏振片/偏振镜
偏振片是用人工方法制成的薄膜,是用特殊方法使选择性吸收很强的微粒晶体在透明胶层中作有规则排列而制成的,它允许透过某一矢量振动方向的光(此方向称为偏振化方向),而吸收与其垂直振动的光,即具有二向色性. 因此自然光通过偏振片后,透射光基本上成为平面偏振光。由于偏振片易于制作,所以它是普遍使用的偏振器。通过调节两个偏振片的相对方向可以过滤掉某些强反光。

图5 偏振片 (左),图6 偏振镜 (右)
2.2偏振光源的光路原理
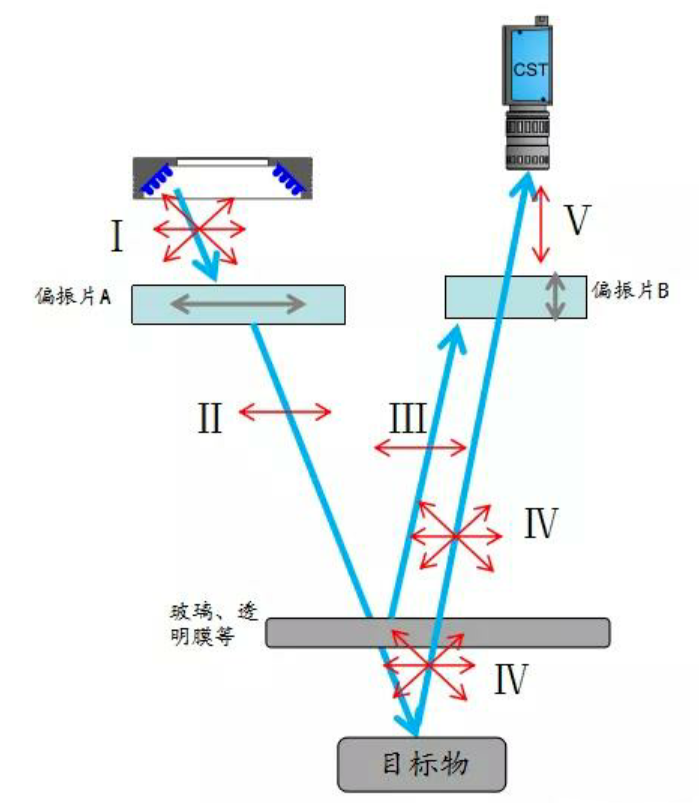
图7 偏振光源光路原理
这里以透明包装膜内的工件检测为例,阐述一下偏光光源的光路原理。如图7所示,由光源发出的光Ⅰ经过偏光片A得到如光Ⅱ的线偏振光。光Ⅱ遇到包装膜时部分会发生镜面反射,即产生光Ⅲ,同时部分会透射至目标物表面并形成漫反射光Ⅳ。此时光Ⅳ经过目标物的反射,振动方向发生变化,再透过玻璃面时偏光状态仍然混乱,变成非偏振光。 在光Ⅲ和光Ⅳ中,光Ⅳ可透过偏光片B,变为光Ⅴ(偏振光)并到达相机的CCD,但只含单方向偏光成分的光Ⅲ会被偏光镜B挡住而不通过,因此可去除玻璃或者透明膜上的镜面反光,轻松提取目标物上的特征信息。
二、视觉行业典型应用
1、偏振光源
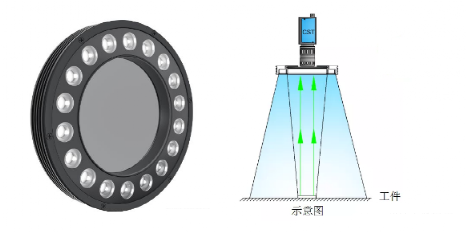
下图展示了偏振光源的典型系统组成,主要应用部件为常规光源、起偏器和检偏器。起偏器集成在光源前部,使得自然光转换为线偏振光,经镜面反射后透过镜头前的检偏器,保证二者正交角度即可阻挡简单的镜面反光,有效去除(抑制)眩光发生。
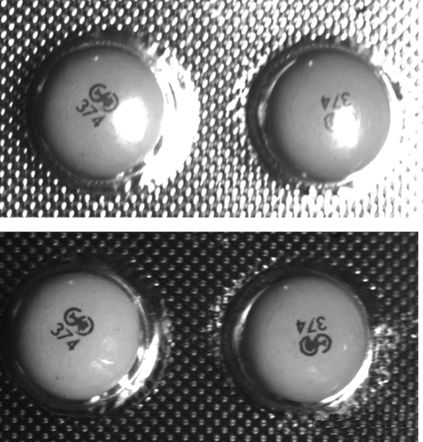
a、药片检测
针对医疗行业中常见的药片漏装、缺陷检测,常常由于表面气罩包的存在导致成像存在眩光(局部过曝),难以清晰地观测内部药片情况。此时可以通过偏振光源实现表面清晰成像,去除气罩包镜面反射导致的眩光等现象。
b、读码器
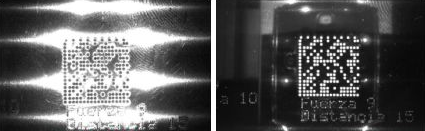
随着工业4.0的高速发展,产品追溯已渗透至各行各业,追溯使用的条码标记也不仅仅局限于平面,而是更多地被标记于弧面、球面等反光表面,同时由于可能存在的条码外包装高反等情况,对于读码器的读码能力带来了更高要求。

而针对成像反光等情况,很多读码器兼容偏振功能,通过配备半偏振/全偏振镜头罩,实现二维码图像的清晰获取。
c、AGV导航
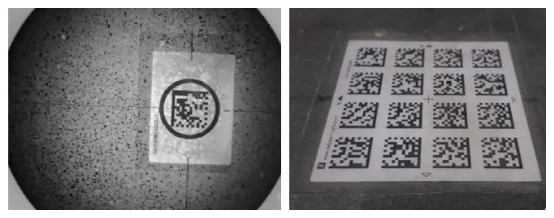
常见AGV导航技术包含磁条导航、二维码导航、纹理导航、激光导航及视觉导航等方式,利用不同的信号反馈定位AGV实时位置以进行搬运作业。以二维码导航及纹理导航为例,常常利用集成在AGV下方的下视相机结合光源进行底面二维码/纹理信息采集,通过识别/匹配算法实现AGV的实时定位,具有定位精度高、稳定性好等优势。
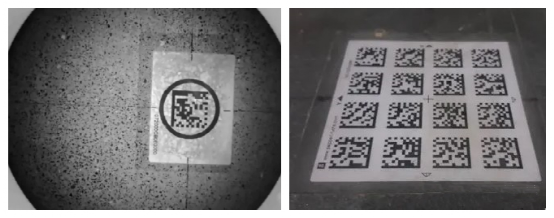
但考虑到二维码材质、地面状态(环氧地坪等),很容易造成反射灯珠成像、局部过曝等现象,常常采用偏振镜头罩解决,分别在光源前方进行起偏和镜头前方检偏,通过两组偏振片的过滤,消除镜面反射效应。
2、偏振导航
天空光具有相对稳定的偏振分布,以Rayleigh散射理论为基础,基于斯托克矢量和地平坐标系,就可以建立简单的天空光偏振分布模型。因此在一定时间、地点观测天空,可以得到一幅稳定的光偏振分布图,获得探测目标的偏振度、偏振方位角信息,实现载体航向信息的获取。
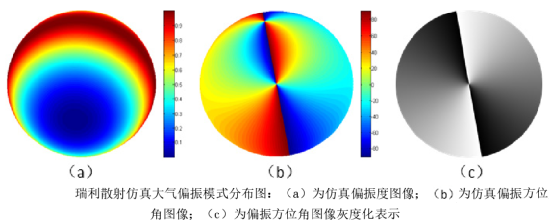
相较于传统导航定位系统,成像式仿生偏振导航装置外形更加小巧,重量更加轻便,光敏感性、集成度可以加优越,受外界环境干扰更小。
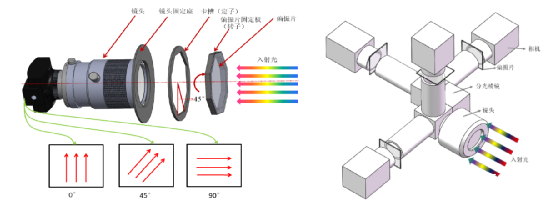
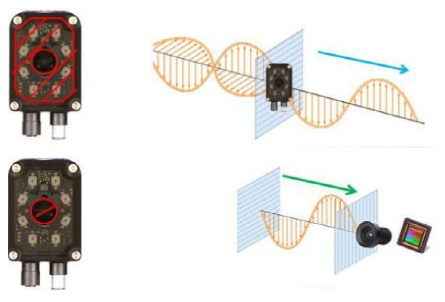
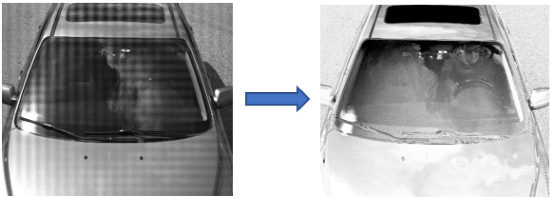
3、偏振相机
许多视觉系统都试图克服玻璃、塑料和金属等反光表面产生的动态或多余光线、反射、朦胧和眩光影响。偏振相机提供四组偏振角分别为 90°、45°、135°和 0°的偏振图像,以根据照明条件的变化,以及相对运动和方向做出补偿,改善在挑战性照明条件下的图像质量和决策时间。
同时除了补获常规的亮度和颜色信息外,还可以补获正常图像传感器无法检测到的偏振信息,使得其能在能见度低、拍摄画面困难情况下进行检测,借助偏振度及偏振方向等偏振特性实现广泛应用。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
