热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


在主界面中选择“图像处理”,如下图所示。

抓取Mark测试
当运用“模板登陆”处理好通道图像后,单击“抓取Mark测试”。手动测试是否准确抓取到Mark点。抓取到斑点重心即显示“OK”,反之则“NG”,如下图所示。

手动对位
单击“手动对位”,软件触发单次拍照取像自动算法处理实现手动对位。

参数设置
点击“参数设置”进入系统相机设置界面如下图,设置相机的相关参数。
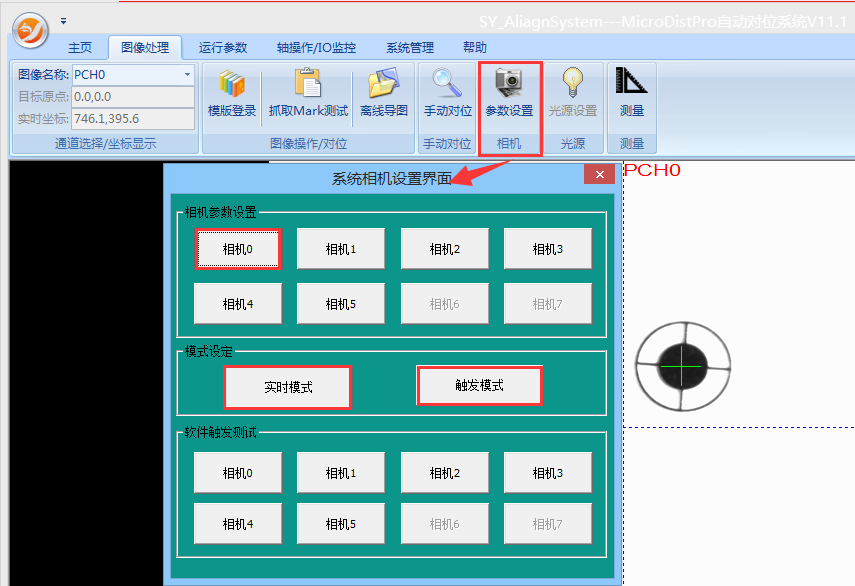
1.进入“相机参数设置”,选择需要设置的相机序号,弹出如下图左边对话框。设置步骤如下:
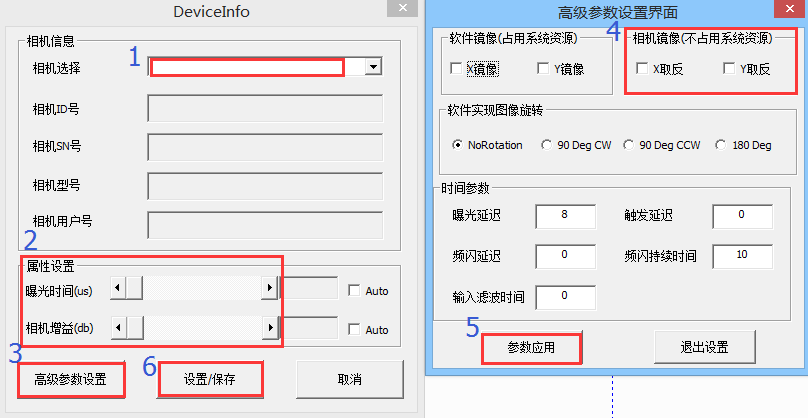
1. 在相机选择中选择相机序号;
2. 设置属性:a.曝光时间: 指从快门打开到关闭的时间间隔,曝光时间越长近光量越多,相应的拍照速度会变慢。
b.相机增益:指相机处理器对光线的敏感程度,感光度越高,对光线的敏感度越强,但图像的燥点也会越多。
3.高级参数设置:单击进入高级参数设置界面;
4.相机镜像:a.得到相机取像的照片经过一系列数学模型算法,将像素左边镜像,会占用相应的运行内存。(不推荐使用);
b.相机内部物理镜像,所以不占用系统运行内存,优先选择。
光源设置
在主界面中选择“图像处理”窗口,点击“光源设置”进入设置光源模式以及亮度,如下图所示。

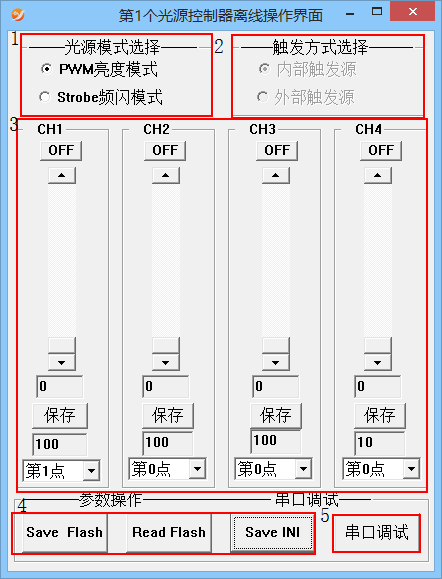
1. 光源模式选择:PWM亮度模式:控制方式为恒流源控制,各通道最大电流可独立设置;Strobe频闪模式:可通过设置触发延迟时间和频闪保持时间来控制光源。
2. 触发方式选择:内部触发源;外部触发源。
3. 光源四通道亮度调节(0~255)。
4. 参数操作:保存亮度、置位亮度、保存设置参数INI。
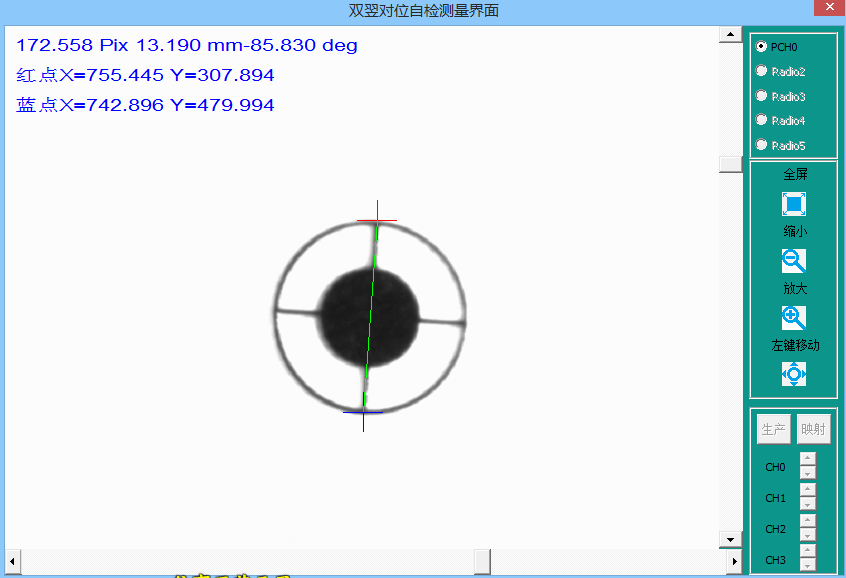
测量
在主界面中点击“测量”进入如图自动测量界面。

自动检测界面中用红色十字光标、蓝色十字光标,移动两光标与被测对象即可以测出像素值,像素坐标。
在主界面中选择“运行参数”,如下图所示。

对位设置
对位设置:点击进入对位系统设置界面,设置对位相关参数。如下图所示。
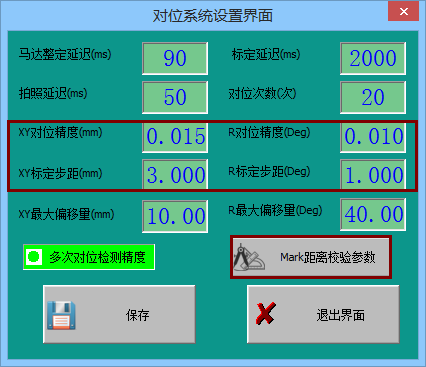
a. 马达整定延迟:马达运动到位停止延迟,在给相机拍照信号。
b. 标定延迟:五点标定运动到位等待拍照时间。
c. 拍照延迟:接收到拍照信号延迟拍照。
d. 对位次数:多次进行精对位,对位运动平台精度越高,对位次数较少,对位越快,精度越高。
e. XY对位精度:精度 = 视野范围/像素数 (单位mm/pix)
f. R对位精度:旋转角度的对位精度(单位 deg)。
g. XY标定步距:系统五点标定XY的步距,范围不可超过运动平台行程以及相机视野。
h. R标定步距:系统五点标定旋转R的步距,范围不可超过运动平台行程以及相机视野。
i. XY最大偏移量:系统五点标定是XY的步距不可超过该XY最大偏移量。
j. R最大偏移量:系统五点标定是旋转R的步距不可超过该XY最大偏移量。
k. Mark距离校验参数:显示个相机通道的图像像素数、物理视野的宽高长度以及精度。
系统标定
1.系统标定说明:
a.含义:在图像测量过程以及机器视觉应用中,为确定运动平台的几何空间位置以及运动状态量与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是系统标定参数
b.意义:标定结果的精度及算法的稳定性直接影响相机与平台之间工作配合产生结果的准确性。因此,做好系统标定是做好后续工作的前提,提高标定精度是科研工作的重点所在。
C.方法:(如下图)
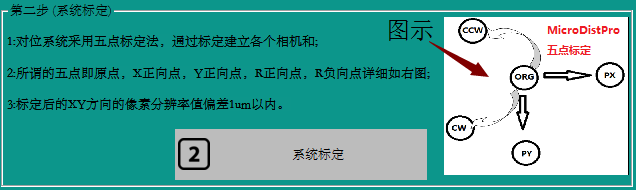
2.进入“系统标定”后弹出如下图所示。

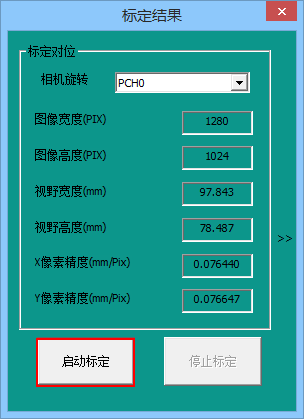
如下图,显示各相机通道的标定信息结果内容。
待系统回零成功,标定参数设置完成后,单击“启动标定”即可启动自动系统标定。系统标定完成之后即自动建立相机与运动平台的几何关系、生产配合关系。
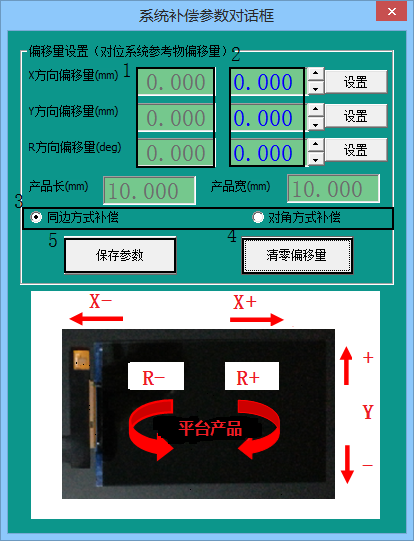
补偿
点击进入“补偿”窗口,弹出系统补偿参数对话框,如图所示。
1.X/Y/R方向偏移量的当前系统总补偿量。
2. X/Y/R方向偏移量的当前设置量,设置量完成后点击“设置”即可将设置量置位到系统总补偿量。
3.a.同边方式补偿:平行于X/Y方向上的偏移补偿方向。
b.对角方式补偿:在XY方向各拟为四边形的相邻的两条边,构建出一个四边形,补偿方向即为平行四边形的两条对角线方向。
4.清零偏移量:清除当前设置量以及系统总偏移量。
5.保存参数:设置好偏移量或清零偏移量,点击保存当前参数设置状态。
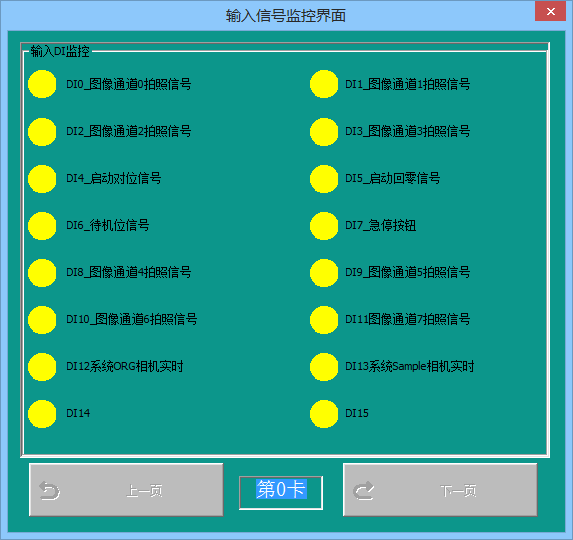
输入信号
在主界面中选择“轴操作/IO监控”窗口,点击“输入信号”进入输入信号监控界面,可以实时监控信号的输入状态,如下图所示。
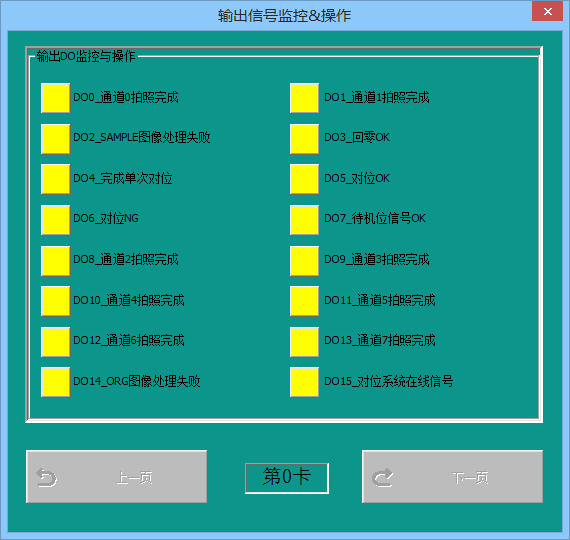
输出信号
在主界面中选择“轴操作/IO监控”窗口,点击“输出信号”进入输入信号监控界面,可以实时监控信号的输出状态,如下图所示。
手动操作
在主界面中选择“轴操作/IO监控”窗口,点击“手动操作”进入轴手动操作界面,可以手动控制轴的运动以及设置待机位位置坐标,如下图所示。

1. 轴位置:CMD :命令指令轴运动的当前位置。
FED:命令指令轴运动由编码器反馈的轴的当前位置。
2. 轴号选择:选择当前的控制的轴号。
3. a.勾选“点动”:控制轴单步运动,运动量为当前设置的“直线距离”
b.勾选“Jog”:控制轴直线运动,直到点击“轴停止”或到正负限位才停止运动。
4. 控制轴的运动:回零、反转、停止、正转。
5. 速比:速度百分比
6. 定为原点:手动单次回到待机位原点。
7. 显示当前轴的待机位坐标。
8. 定位待机位:置位当前轴设置的待机位坐标。
9. 保存点位:保存所有轴的待机位坐标。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
