
{kind=link}
{kind=link}
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A



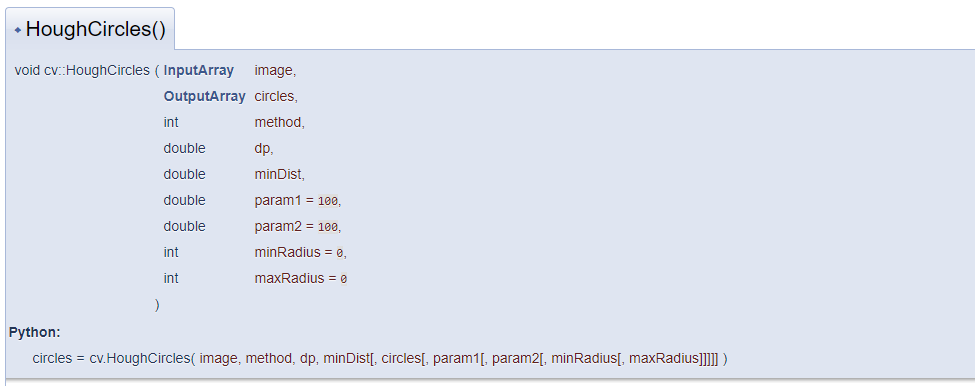
代码:
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <math.h>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat img, gray;
if( argc != 2 || !(img=imread(argv[1], 1)).data)
return -1;
cvtColor(img, gray, COLOR_BGR2GRAY);
// smooth it, otherwise a lot of false circles may be detected
GaussianBlur( gray, gray, Size(9, 9), 2, 2 );
vector<Vec3f> circles;
HoughCircles(gray, circles, HOUGH_GRADIENT,2, gray.rows/4, 200, 100 );
for( size_t i = 0; i < circles.size(); i++ )
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
// draw the circle center
circle( img, center, 3, Scalar(0,255,0), -1, 8, 0 );
// draw the circle outline
circle( img, center, radius, Scalar(0,0,255), 3, 8, 0 );
}
namedWindow( "circles", 1 );
imshow( "circles", img );
waitKey(0);
return 0;
}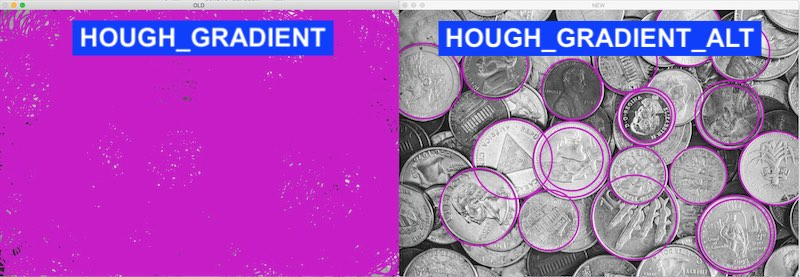
但是HoughCircle的缺点也是显而易见的,简单来说,在默认参数下,它非常容易丢目标。
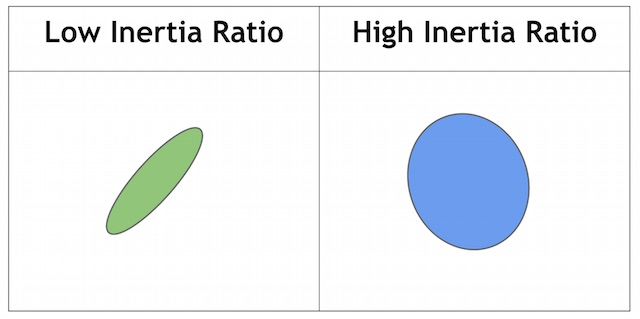
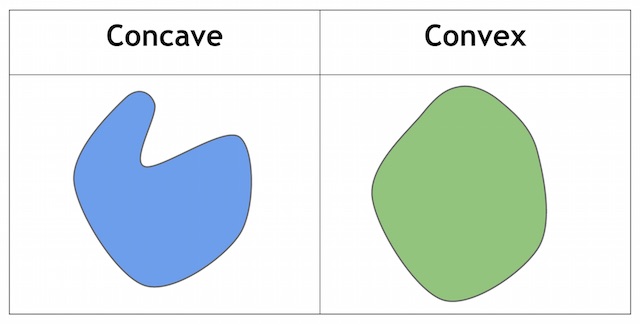
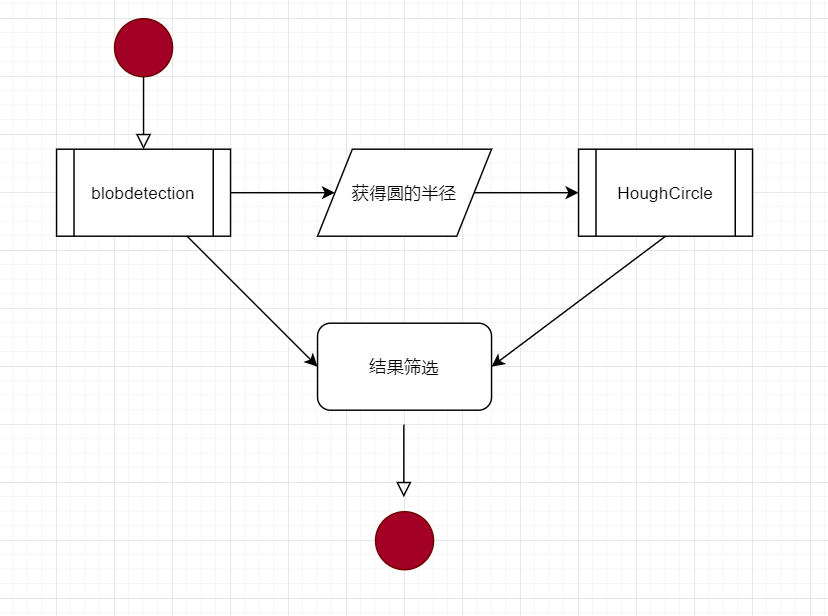
2.2BlobDetector
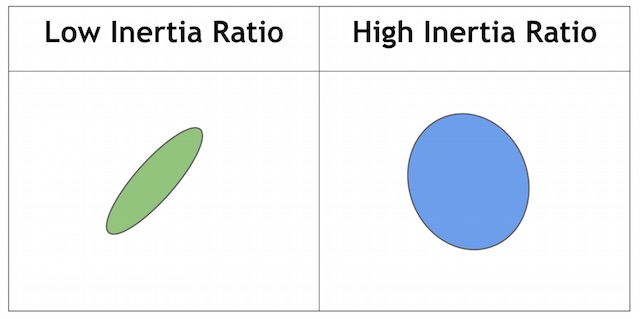
 )。圆的为圆度为1,正方形的圆度为PI/4,依此类推。
)。圆的为圆度为1,正方形的圆度为PI/4,依此类推。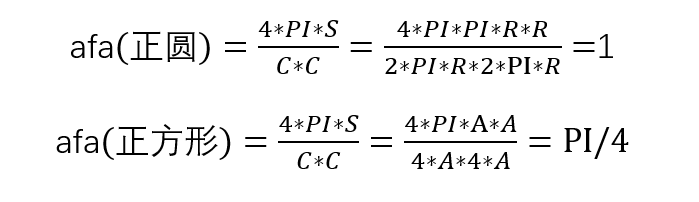

热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
