














热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
《数字摄影测量学》
以给定的模式作为参考模板,是高精度匹配法之一。
德国Ackermann提出,利用影像窗口内的信息进行平差计算,使得影像匹配达到0.1甚至0.01像素的精度。
不仅可以解决单点匹配single-point matching求视差,也可以直接解求其空间坐标同时解求影像的方位元素;
还可以解决多点影像匹配multi-point matching和多片影像匹配问题multi-photo matching(胡翔云,2001);
Gruen等(Gruen,1985;1992)对LSM进行了扩展,以给定的特征模式作为参考模板与实际影像做最小二乘影像匹配,从而以很高的精度提取目标,称为最小二乘模板匹配Least Squares Template Matching ,LSTM。LSTM可以扩展到利用多张重叠影像直接提取特征的物方坐标,如Gruen的LSB-Snake方法(Gruen,1997)和后续的空间圆重建等。
生成一个理想的小块边缘模板;
将该模板与测量图像进行匹配,精确提取特征的边缘位置;
给定模板灰度f(x,y),对应点为
测量图像的匹配窗口灰度g(x,y),对应点为
模板与测量图像存在仿射变换:
匹配的目的是:解算出变换参数
,结合 边缘点在给定模板上的精确坐标,可以得到边缘点的精确位置。
最小二乘是一个迭代过程,第一步的粗提取结果作为变换参数的迭代初值,代入矩阵方程求变形参数;
利用改正后的参数对测量图像重采样,计算模板与匹配子图的相关系数。若大于预定阈值,迭代结束。

最小二乘匹配是目前常用的直线段提取的方法,该方法精度高,稳定灵活。
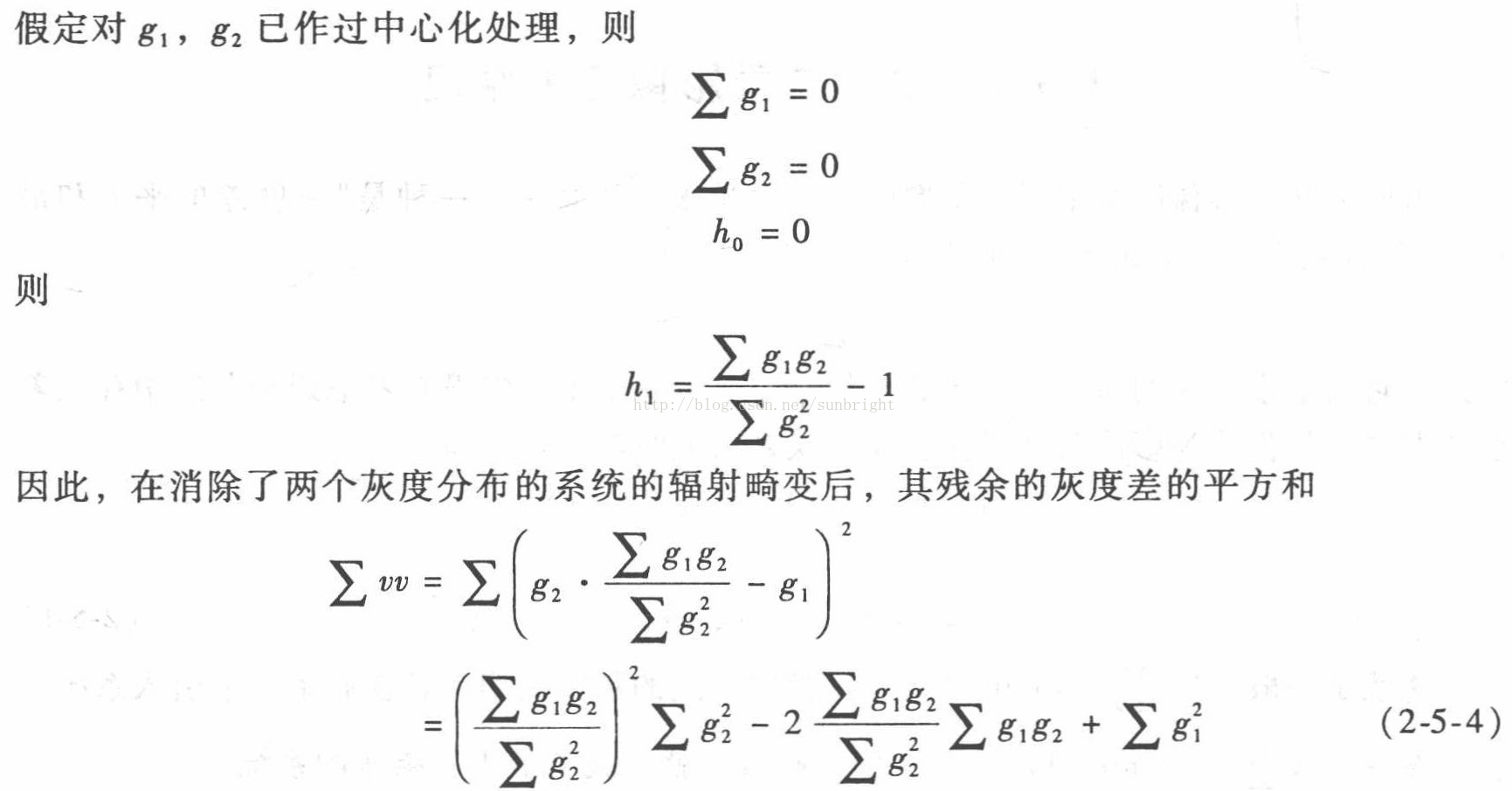
h0,h1是辐射畸变参数。下面用g1表示实际影像模板,g2表示标准模板。
即:g1=h0+h1*g2
这里认为g1和g2是线性相关的!
误差:v=h0+h1*g2-g1
相关系数h0和h1:其中n为模板的像素数。
**************************************************************************************************************
一条直线段可用2个端点来表达,因此模板匹配的未知数就是端点坐标的改正数。由于图像已经旋转水平,那么起作用的只有y方向的改正数。(这里是不是只考虑平面上的平移和旋转,若z方向改变了,怎么办?)




*************************************************************************************************************
接上面的h1和h0,《数字摄影测量学》



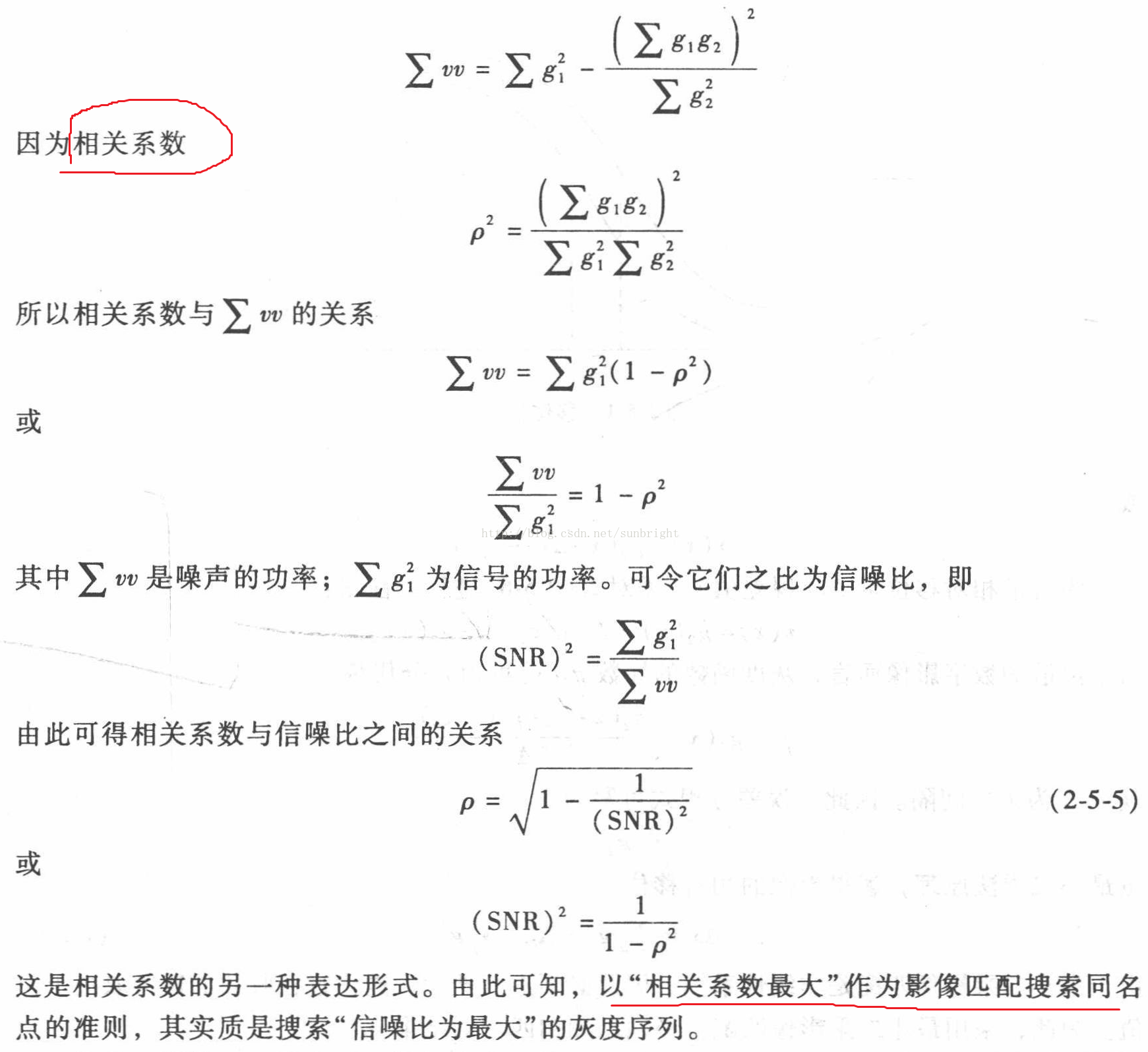
注意:这里没有引入几何变形参数,因此,匹配算法采用目标区相对于搜索区不断移动一个整体像素,在移动的过程中计算相关系数,搜索最大相关系数的影像区作为同名像点。
搜索过程:
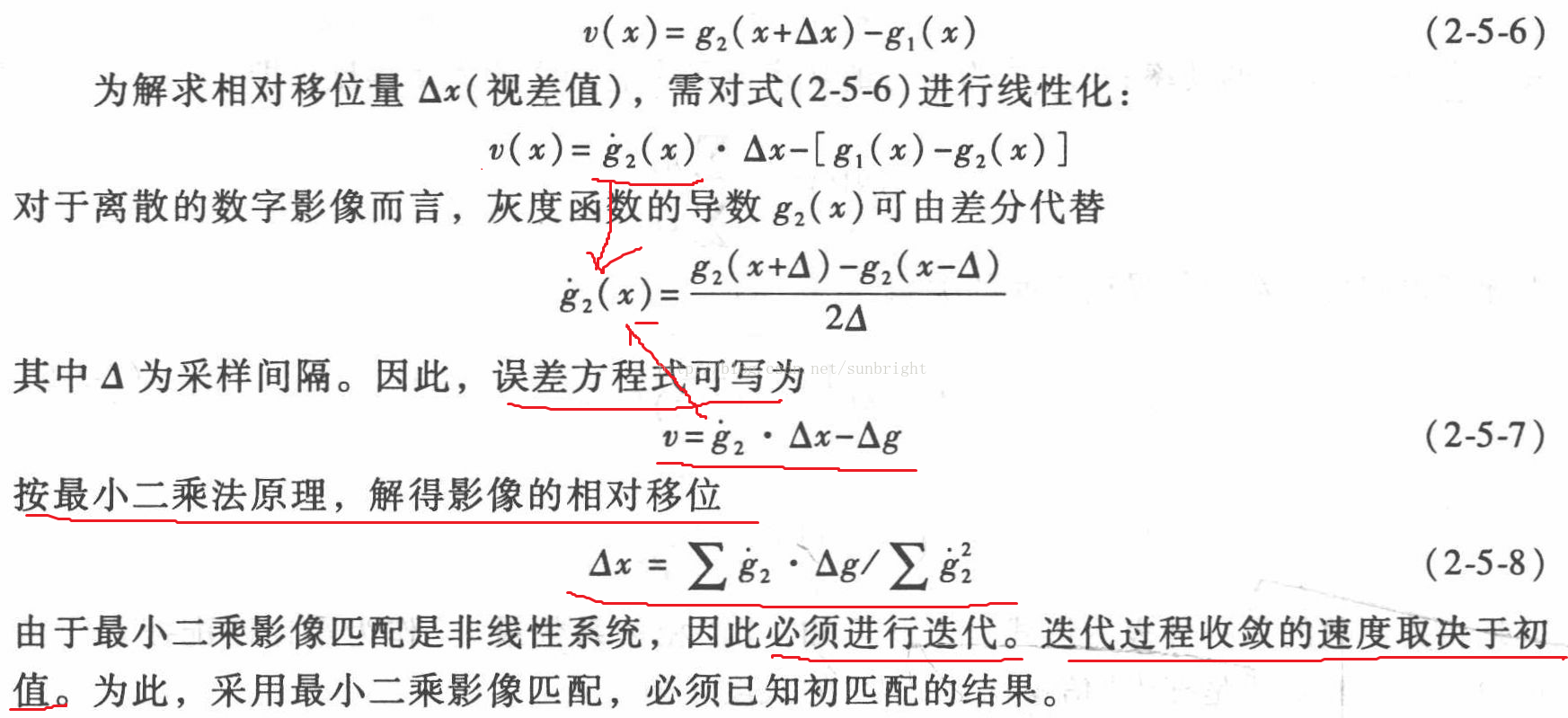
灰度函数g1和g2,其中,g2相对于g1存在移位 (视差值)
(视差值)

6、基于单点的最小二乘匹配
两个2维图像的几何变形,不仅存在如5的相对移位,图形也会变化。
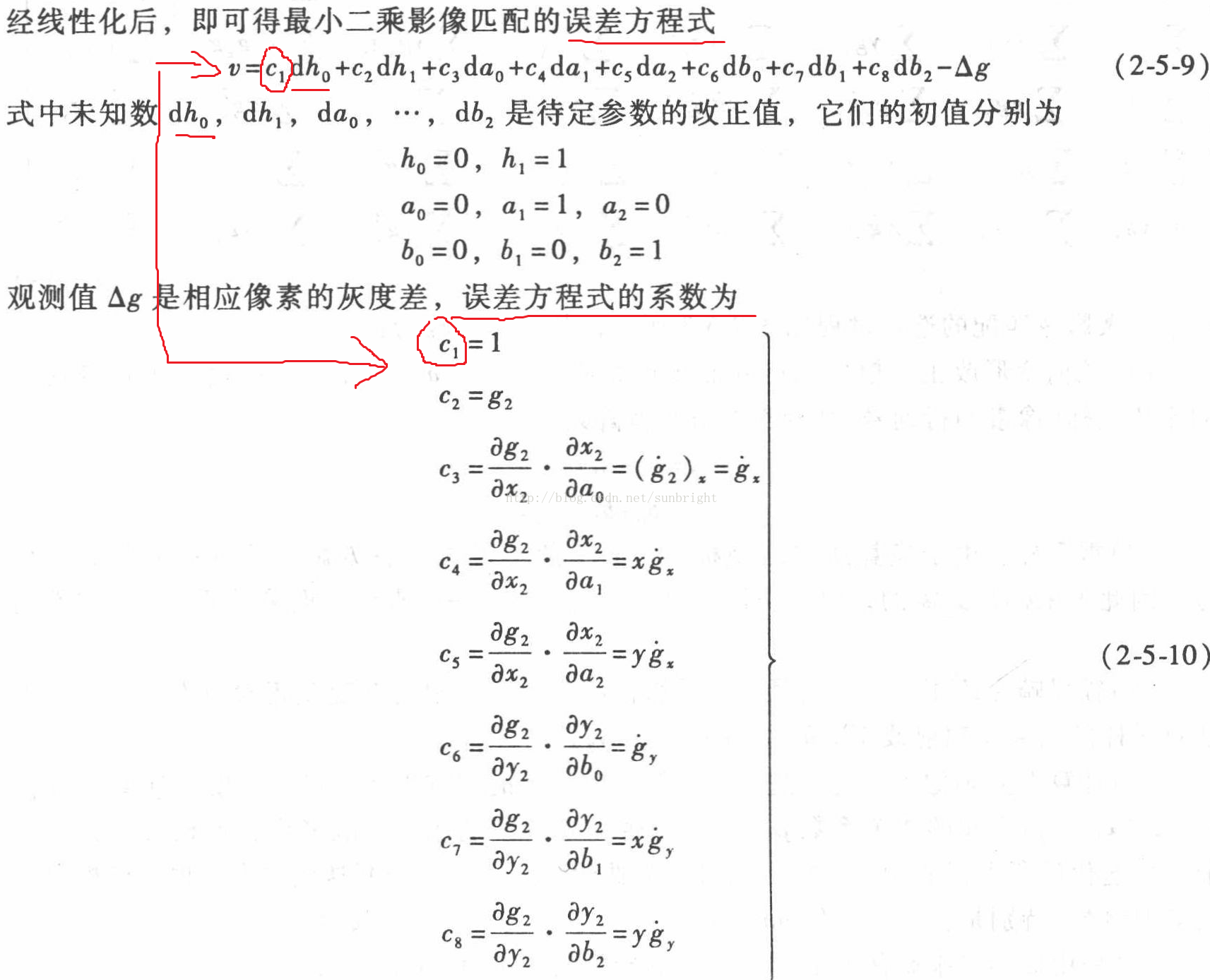
考虑一次几何畸变:
再加上线性灰度畸变:

热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
