热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A


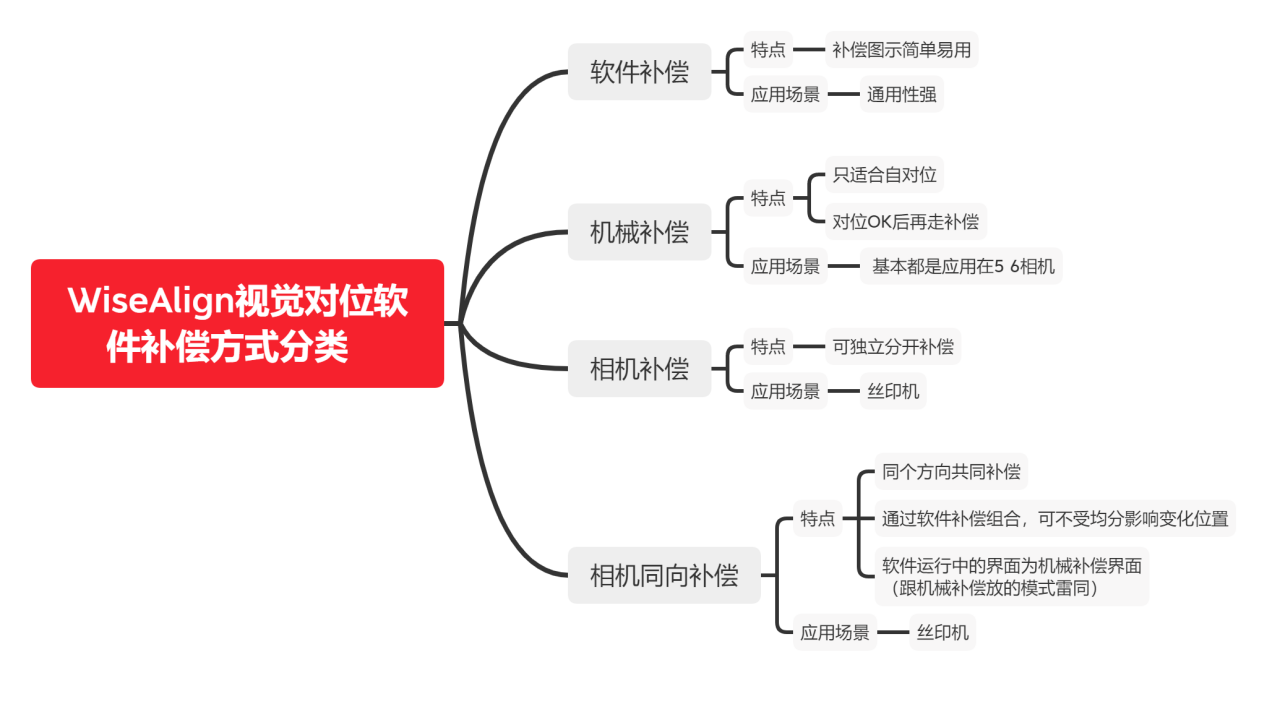
WiseAlign视觉对位软件(下文中以WA作为WiseAlign软件的简称)的优势就是结合了高精度的对位运动平台对产品进行精密对位纠偏,不论是XYR平台或者UVW平台都可以根据平台参数进行控制。同时,WA软件本身的标定模块能够将多个相机和 运动平台标定,将视觉坐标系和机构坐标系统一起来,校正了相机的畸变误差并对平台平移旋转进行标定,更重要的是,针对精密对位平台执行机构,WA软件能够提供校正补偿功能,通过误差补偿参数设置,能够对系统固定误差(固有误差一般为产品自身的误差亦或是治具的误差等)进行有效的补偿。本文将对WA软件的补偿模式进行说明。
1. 在使用软件补偿的时候要注意,补偿的时候先补角度R再补X跟Y,这样更便于判断补偿是否正确,软件补偿只要看着对应的箭头指的方向去补对应的补偿方向就可以了。
2. 补偿X正方向先填写补偿对应的距离,然后点击“设置方向-X”,补偿负方向要数字前面加个负号就可以了。
备注:蓝色箭头指的方向就是Mark点补偿的移动方向

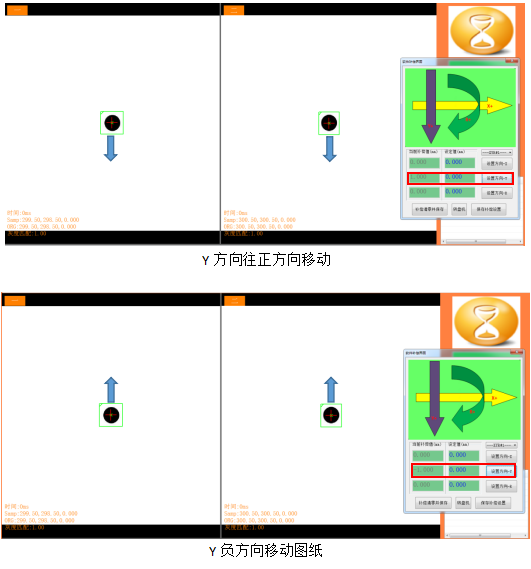
3. 补偿Y正方向先填写补偿对应的距离然后点击“设置方向-Y”就可以,补偿负方向要数字前面加个负号就可以了。
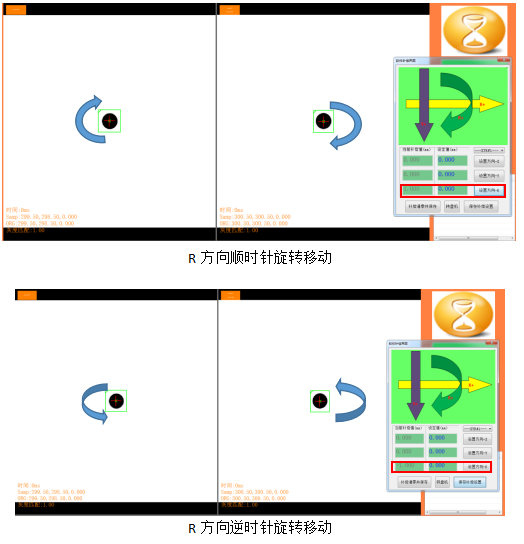
4. 补偿R正方向先填写补偿对应的距离然后点击“设置方向-R”就可以,补偿负方向要数字前面加个负号就可以了。
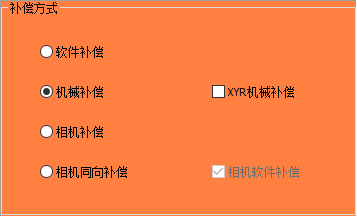
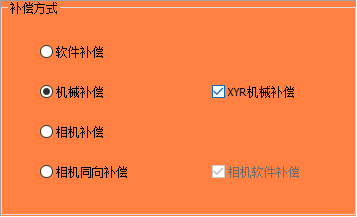
补偿方式:机械补偿
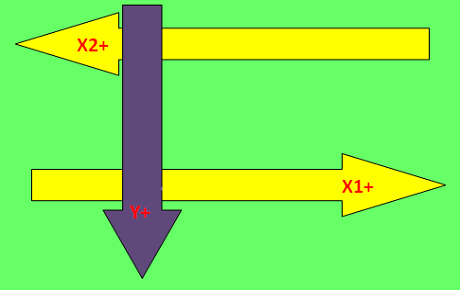
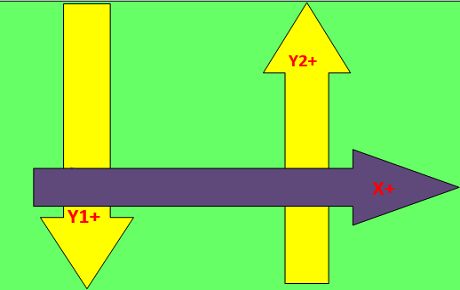
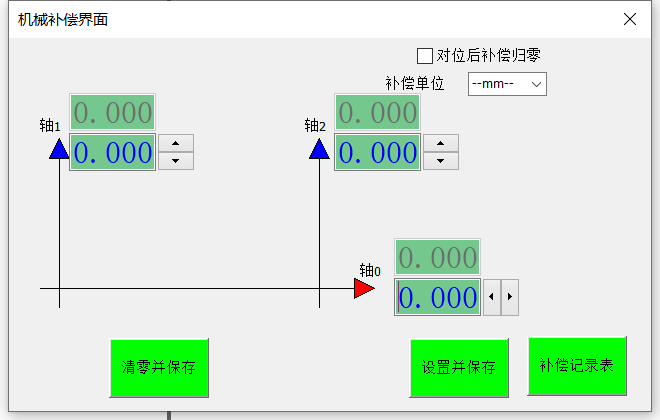
按平台类型(XXY、XYY、XXYY)图示补偿,系统会自动按照平台类型定义补偿图示的轴0为X1或X2,以下图为例:
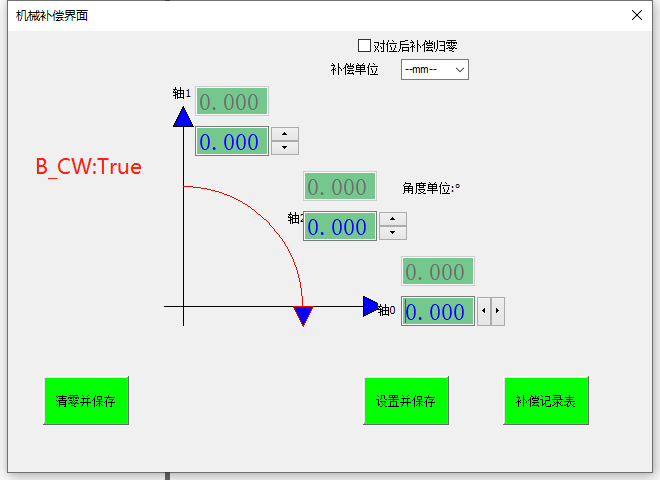
1. 在选择XXY平台类型,勾选B_CW的情况下;
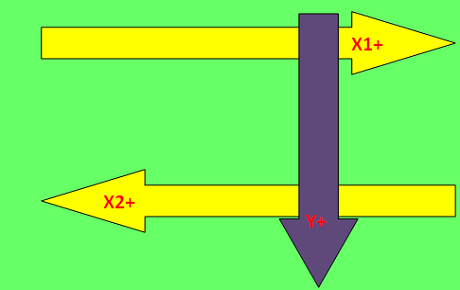
按照补偿图示定义,轴0为X1轴,轴1为X2轴,轴2为Y轴;
2. 在选择XXY平台类型,不勾选B_CW的情况下
按照补偿图示定义,轴0为X2轴,轴1为X1轴,轴2为Y轴
3. 在选择XYY平台类型,勾选B_CW的情况下
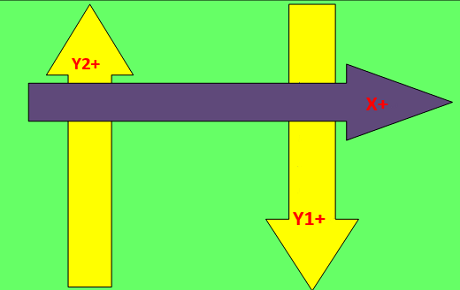
按照补偿图示定义,轴0为X轴,轴1为Y2轴,轴2为Y1轴
4. 在选择XYY平台类型,不勾选B_CW的情况下
按照补偿图示定义,轴0为X轴,轴1为Y1轴,轴2为Y2轴
5. 在选择XXYY平台类型,勾选B_CW的情况下
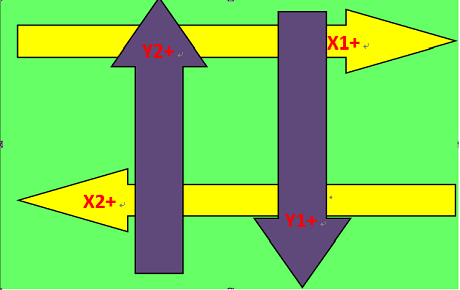
按照补偿图示定义,轴0为X2轴,轴1为Y2轴,轴2为Y1轴
6. 在选择XXYY平台类型,不勾选B_CW的情况下
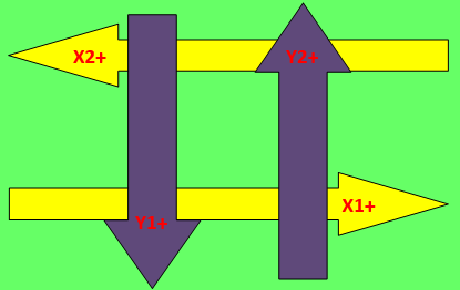
按照补偿图示定义,轴0为X1轴,轴1为Y1轴,轴2为Y2轴
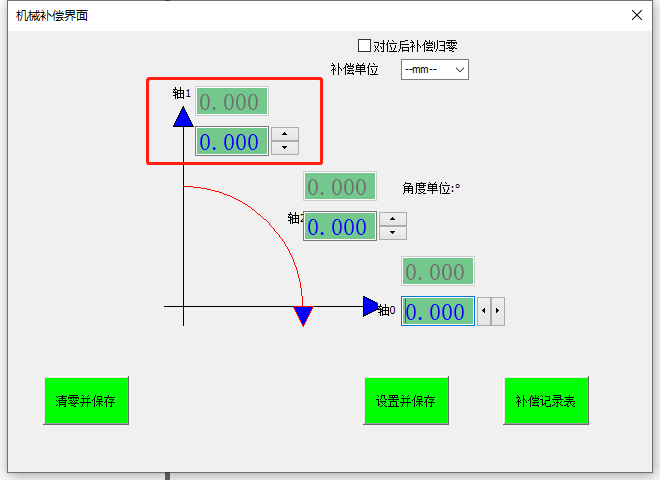
对应所选择的平台类型,找出XY所对应的轴0、轴1、轴2(方向)来输入补偿值后,设置保存即可
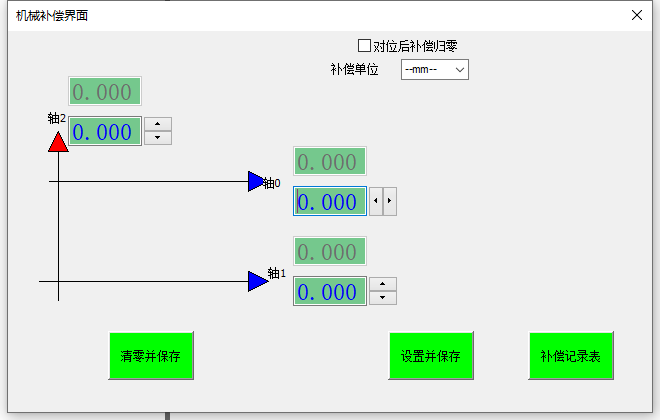
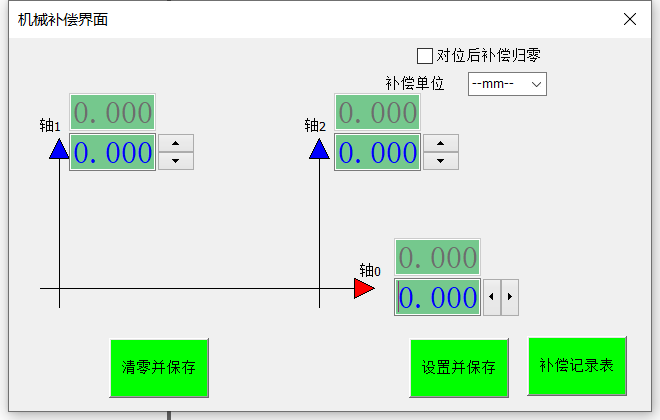
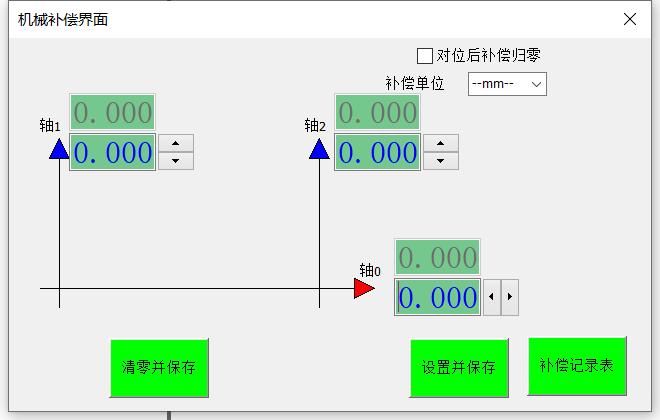
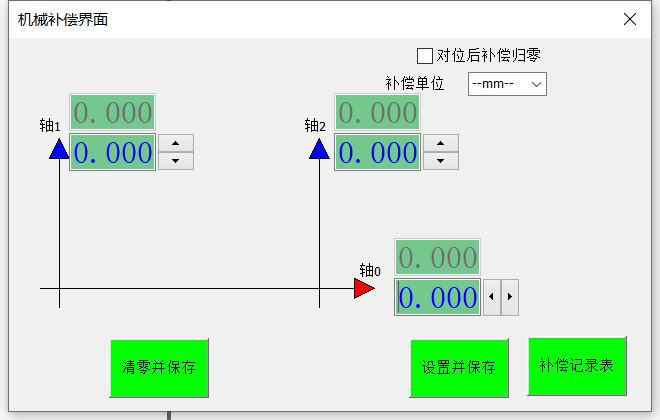
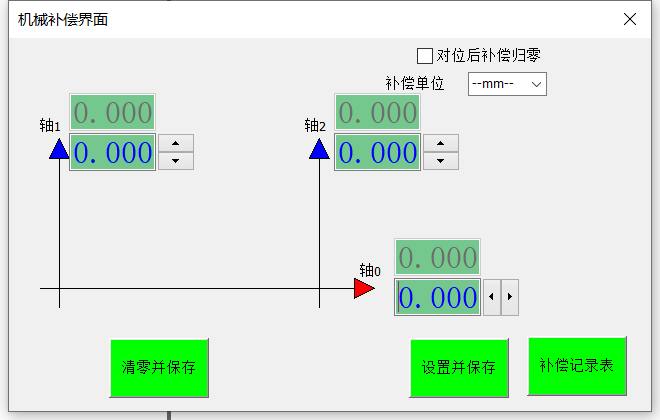
补偿方式:机械补偿+XYR补偿
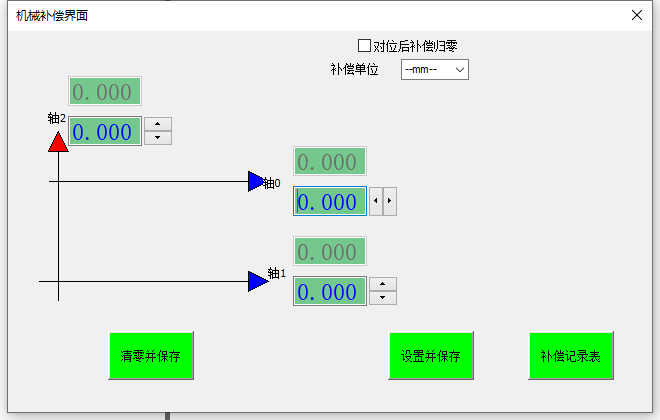
1. 按补偿图示进行补偿,根据BCW是否勾选而改变角度旋转的补偿方向;补偿为系统软件对位 OK 后,再根据补偿方向模型走补偿值,等移动完毕后即表示流程结束
2. 机械补偿界面▲箭头指向的方向即为正向,相反则为反向,分别通过点击轴方向的上下按钮或者键入数值可以修改补偿值,点击[设置并保存]即可生效
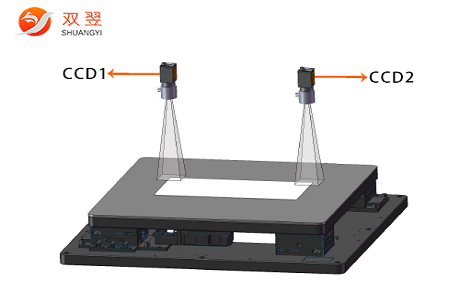
1. 补偿的方向是根据Mark点的位置偏差去补偿对应的位置.(相机补偿是通过修改各自相机基准点位置实现)
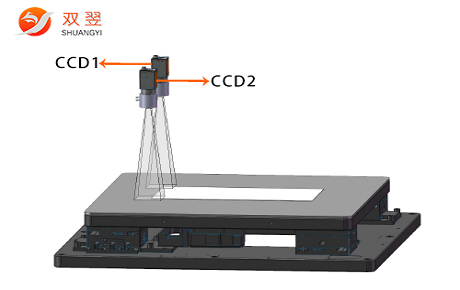
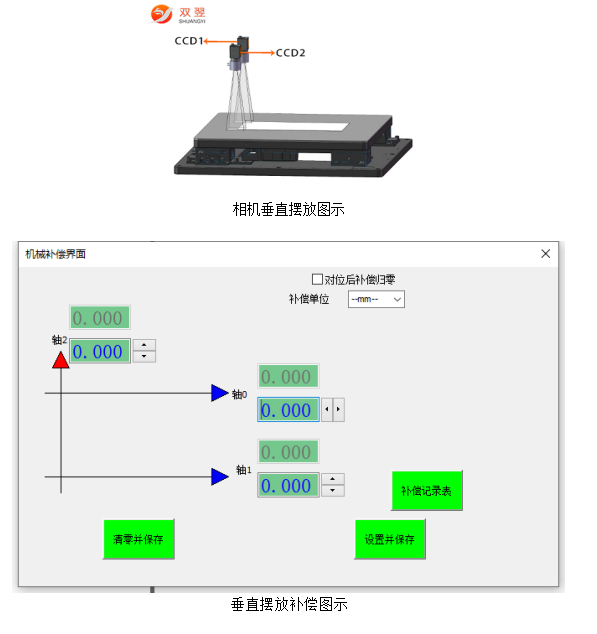
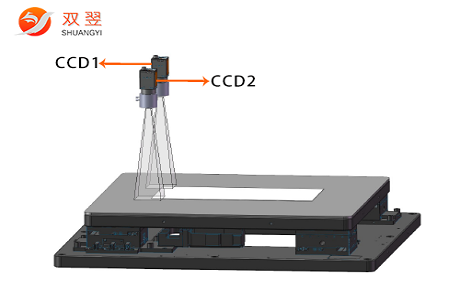
2. 相机摆放的方式有两种,一种是垂直,一种是水平,不过补偿方向大致都一样,只要根据Mark点对应的方向设置补偿方向就可以了。
3. 首先讲相机垂直摆放的补偿说明。
相机垂直
3.1. 平台要X整体方向移动就要设置补偿X0“  ”跟X1“
”跟X1“  ”就是加X方向往正方向移动或是X0“
”就是加X方向往正方向移动或是X0“  ”跟X1“
”跟X1“  ”减X方向往负方向移动。
”减X方向往负方向移动。
备注:蓝色箭头指的方向就是Mark点补偿的移动方向

3.2. 平台要Y整体方向移动就要设置补偿Y0“  ”跟Y1“
”跟Y1“  ”就是加Y方向往正方向移动或是Y0“
”就是加Y方向往正方向移动或是Y0“  ”跟Y1“
”跟Y1“ ”减Y方向往负方向移动。
”减Y方向往负方向移动。

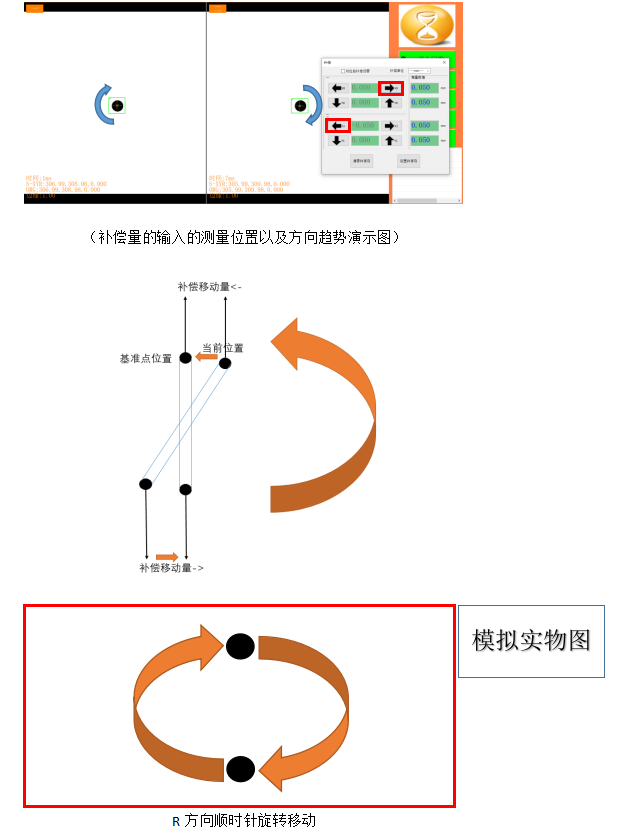
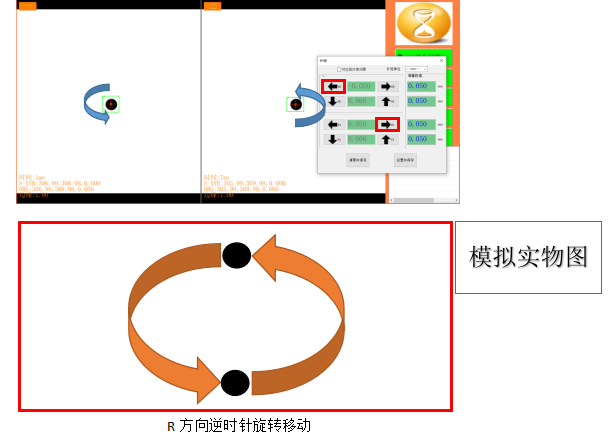
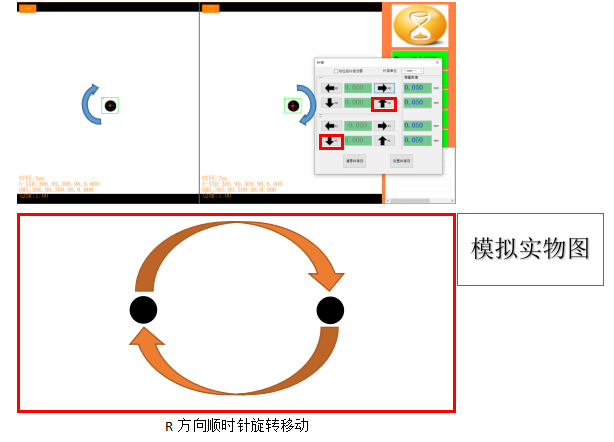
3.3. 平台要R整体方向移动就要设置补偿X0“  ”跟X1“
”跟X1“  ”就是加R方向顺时针旋转移动或是X0“
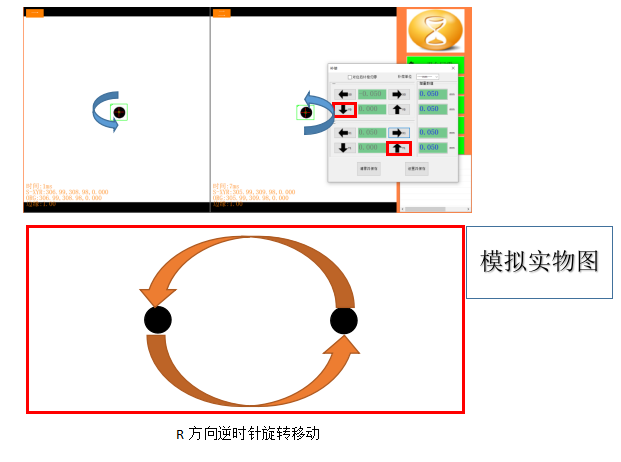
”就是加R方向顺时针旋转移动或是X0“  ”跟X1“
”跟X1“  ”减R方向逆时针旋转移动。
”减R方向逆时针旋转移动。
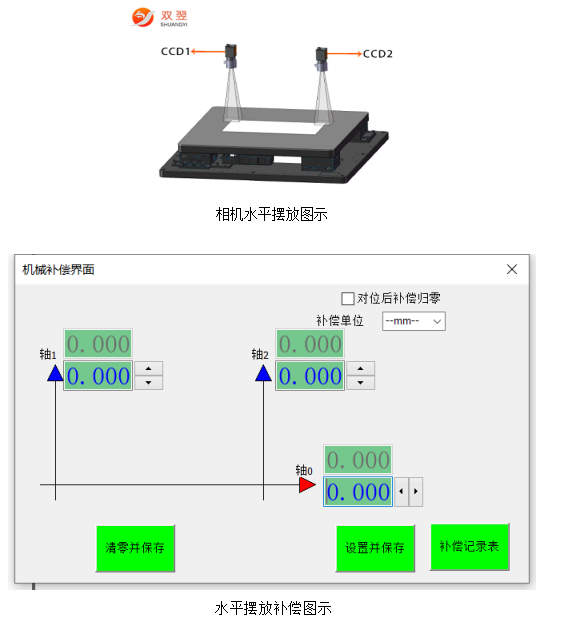
4. 相机水平摆放的补偿说明
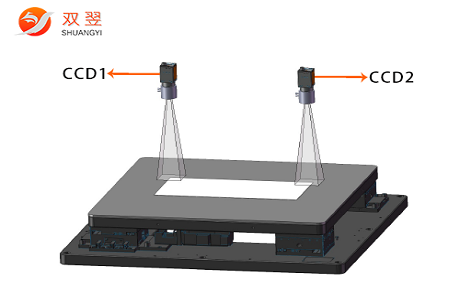
相机水平
4.1. 平台要X整体方向移动就要设置补偿X0“  ”跟X1“
”跟X1“  ”就是加X方向往正方向移动或是X0“
”就是加X方向往正方向移动或是X0“  ”跟X1“
”跟X1“  ”减X方向往负方向移动。
”减X方向往负方向移动。
备注:蓝色箭头指的方向就是Mark点补偿的移动方向

4.2. 平台要Y整体方向移动就要设置补偿Y0“  ”跟Y1“
”跟Y1“  ”就是加Y方向往正方向移动或是Y0“
”就是加Y方向往正方向移动或是Y0“  ”跟Y1“
”跟Y1“  ”减Y方向往负方向移动。
”减Y方向往负方向移动。
4.3. 平台要R整体方向移动就要设置补偿Y0“  ”跟Y1“
”跟Y1“ ”就是加R方向顺时针旋转移动或是Y0“
”就是加R方向顺时针旋转移动或是Y0“  ”跟Y1“
”跟Y1“  ”减R方向逆时针旋转移动。
”减R方向逆时针旋转移动。
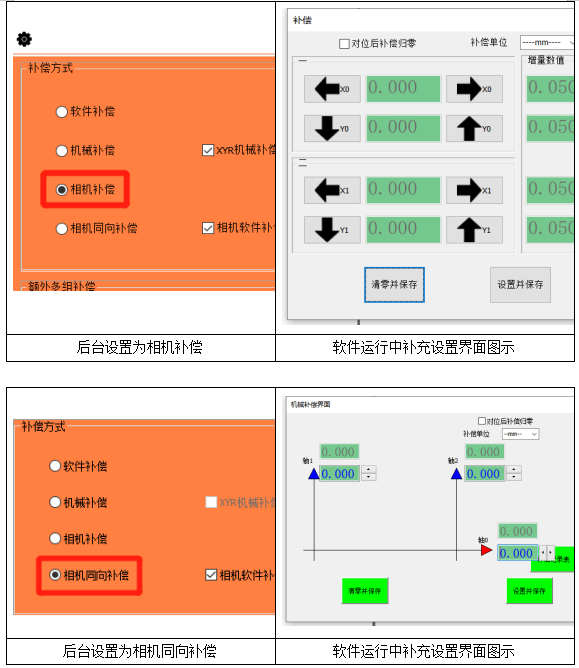
补偿方式:相机同向补偿
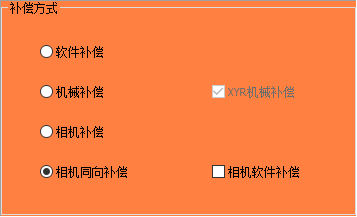
与常规的相机补偿不同是,相机同向补偿可将两相机的X或Y同个方向进行补偿;在两个相机的X方向同向补偿时,两个相机的Y方向单独补偿,而Y方向同向补偿时,两相机的X方向单独补偿;
相机同向补偿的是X还是Y,取决于相机是水平摆放还是垂直摆放,补偿图示也会有所不同。以相机水平摆放补偿图示为例,轴0为X方向,轴1、轴2分别为CCD1、CCD2的Y方向。
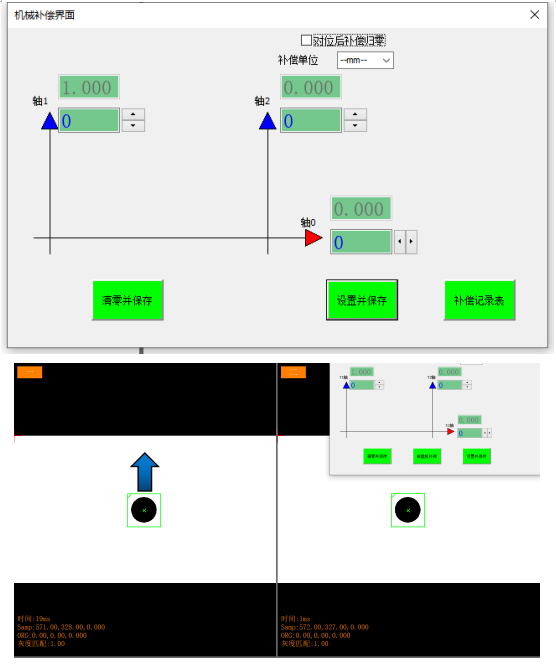
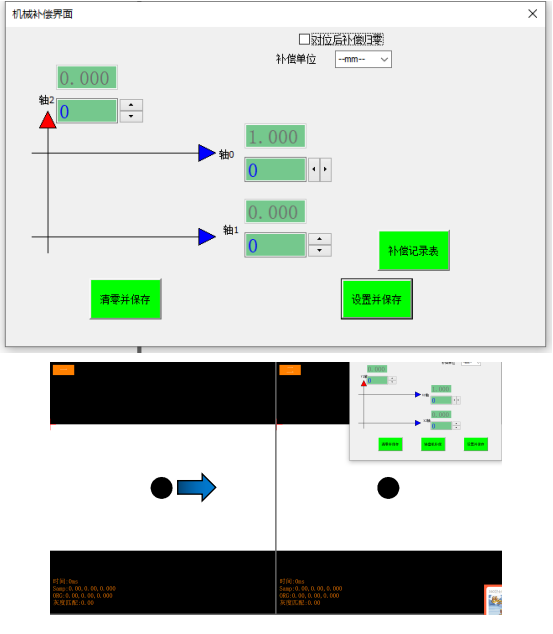
补偿方式:相机同向补偿+相机软件补偿
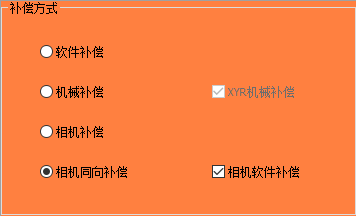
1. 相机软件补偿:分为水平和垂直;
两相机水平,补偿左边CCD1相机Y时,正常相机补偿右边CCD2也会因为均分对位而受到影响,位置会变化;使用“相机软件补偿”后,右边CCD2相机的位置就基本不会变化
2. 相机软件补偿界面图所示轴1▲箭头指向为补偿的正向,反之为反向。轴1代表左边相机CCD1,轴2代表右边相机CCD2,可分别通过点击轴1轴2轴0的上下按钮或者键入数值可以修改补偿值,点击[设置并保存]即可生效
3. 在两相机水平摆放时,轴1输入数值1(补偿单位默认mm),此时轴1(左相机CCD1的Y方向)会往箭头指向走补偿1mm,轴2轴0在不更改的情况,通过内部算法的软件补偿,位置基本不会发生变化。
4. 两相机垂直,补偿CCD1相机X时,正常相机补偿CCD2相机也会因为均分对位而受到影响,位置会变化;使用“相机软件补偿”后,CCD2相机的位置就基本不会变化
5. 在两相机垂直摆放时,轴0输入数值1(补偿单位默认mm),设置并保存后,此时CCD1相机的X方向轴0会往箭头所示的正向走补偿1mm,轴1轴2在不更改的情况,位置不会发生变化。
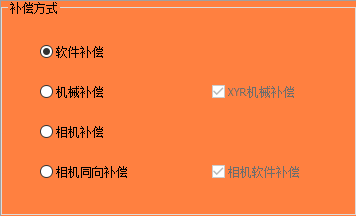
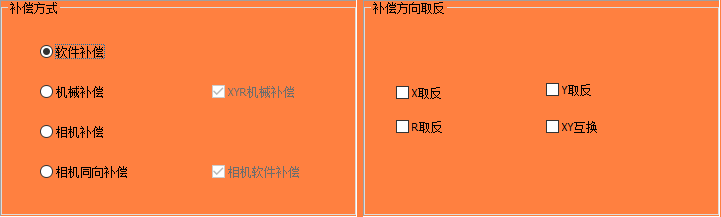
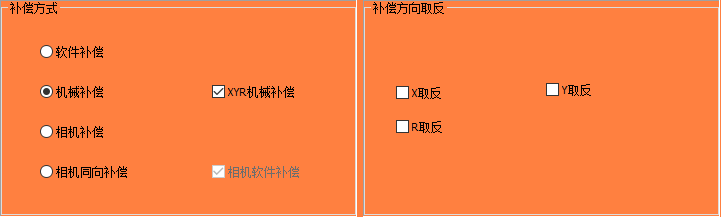
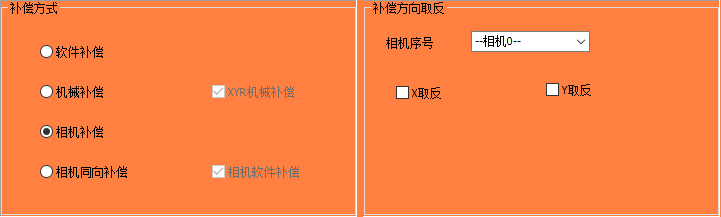
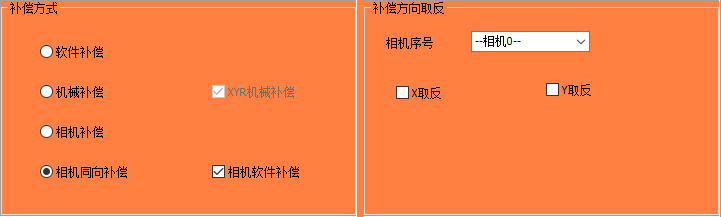
当补偿方向与补偿图示不一致时,可勾选相对应的XYR方向取反或XY互换;选择不同的补偿方式,补偿方向取反功能内容会有所限制;以下是各种补偿方式的功能图示,不做单独说明,功能原理性一致。
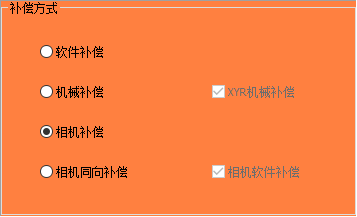
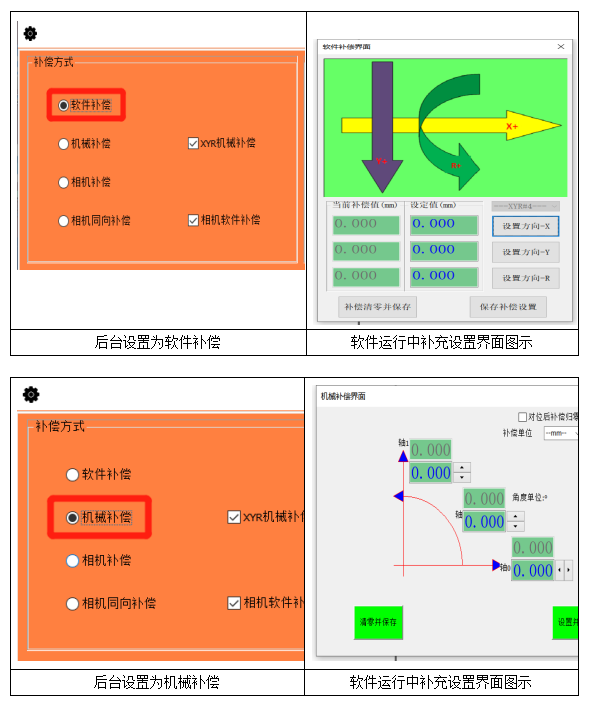
1. 补偿方式:软件补偿
2. 补偿方式:机械补偿
3. 补偿方式:相机补偿
4. 补偿方式:相机同向补偿
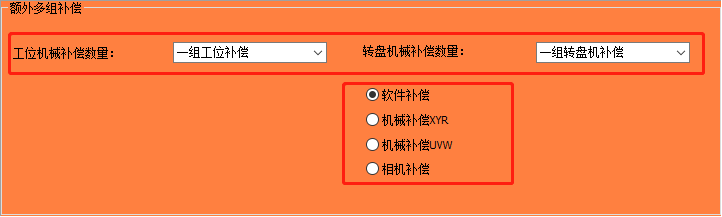
1. 额外多组补偿分为工位机械补偿和转盘机械补偿,还能选择不同的补偿方式,具体补偿方式的使用方法参照上述补偿方式说明;
2. 工位机械补偿(数量):工位各自独立补偿
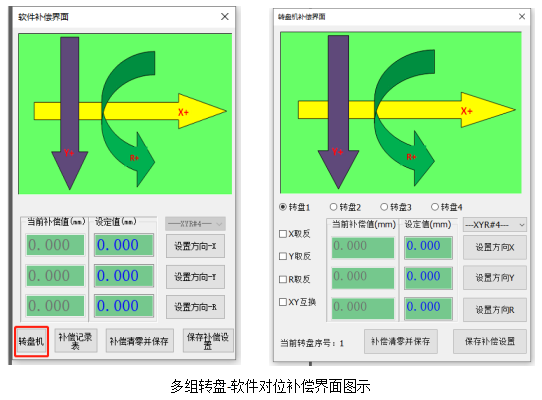
3. 转盘机械补偿(数量):转盘一作为主补偿,主补偿会补偿其他转盘机,然后其他转盘机还有误差再单独补偿。
软件后台设置图示
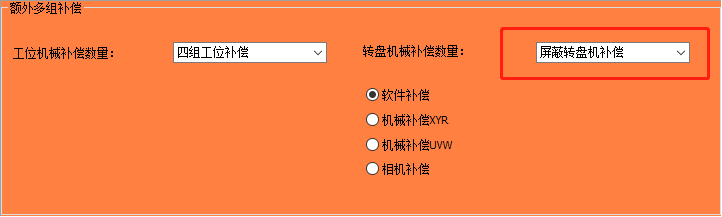
4. 需要注意多组工位或转盘有不同的对位信号区分(输入信号需要发送:工位/转盘一二三四五拍照对位信号+DI0启动拍照对位信号进行区分)

5. 选择多组工位机械补偿时,需要选择屏蔽转盘机补偿
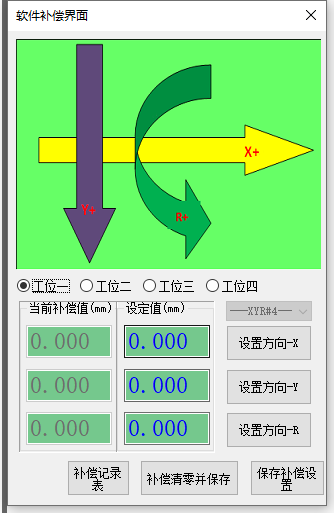
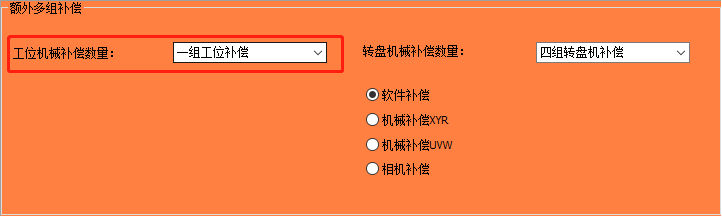
多组工位-软件对位补偿界面图示
6. 选择多组转盘机补偿时,需要选择一组工位补偿
深圳市双翌光电科技有限公司是一家以机器视觉为技术核心,自主技术研究与应用拓展为导向的高科技企业。公司自成立以来不断创新,在智能自动化领域研发出视觉对位系统、机械手视觉定位、图像处理库等为核心的20多款自主知识产权产品。涉及自动贴合机、丝印机、曝光机、叠片机、贴片机、智能检测、智能镭射等众多行业领域。双翌视觉系统最高生产精度可达um级别,图像处理精准、速度快,将智能自动化制造行业的生产水平提升到一个更高的层次,改进了以往落后的生产流程,得到广大用户的认可与肯定。随着智能自动化生产的普及与发展,双翌将为广大生产行业带来更全面、更精细、更智能化的技术及服务。
热线电话:0755-23712116
邮箱:contact@shuangyi-tech.com
地址:深圳市宝安区沙井街道后亭茅洲山工业园工业大厦全至科技创新园科创大厦2层2A
