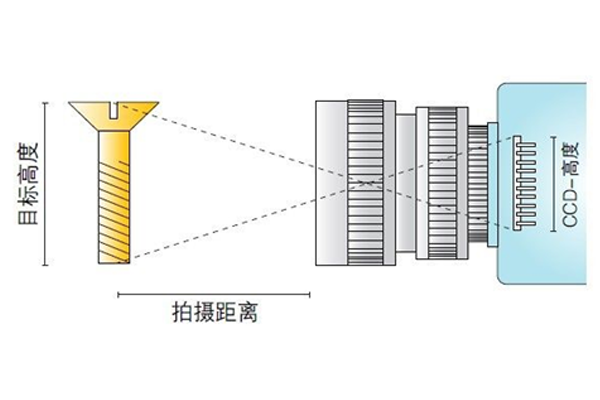
在智能制造浪潮中,机器 视觉检测 系统凭借非接触式、高精度、高效率的特性,已成为工业检测领域的核心技术。然而,其检测效果受多重因素制约,本文将从硬件选型、软件算法、环境干扰及机械结构四大维度,系统解析影响机器视觉检测系统稳定性的关键因素。 一、硬件系统:成像质量的基石 1. 工业相机的核心参数 工业相机作为图像采集的"眼睛",其传感器类型直接影响成像稳定性。CCD传感器因灵敏度高、噪声低、抗冲击性强,在稳定性方面优于CMOS传感...
2025-06-30 17:46:45