

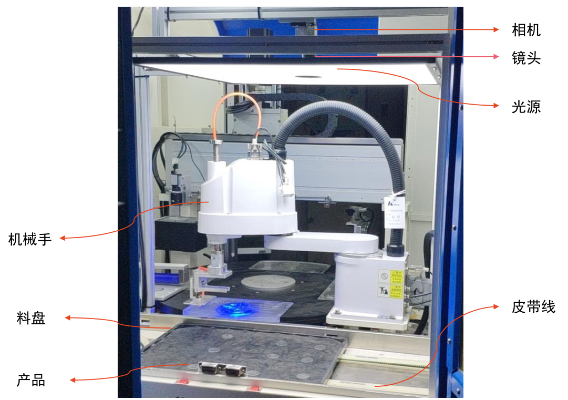
定位原理概述 系统架构 视觉定位系统采用打正向光方式,光源在机械手上方,CCD从上往下拍摄,进行图像分析定位。相机将计算出的像素坐标转换为机械手的物理坐标,视觉软件与机械手进行网口通讯,将视野内物料的物理坐标发送给机械手,机械手抓取物料放在指定工位。 系统采用宫格标定,自定义行列数和间距及旋转角度,通过机械手发送的当前机械坐标,视觉软件自动计算出宫格机械坐标,视觉软件与机械手进行网口通讯,机械手吸取物料到达指定的机械坐标,相机拍摄物料计算...
2020-12-15 15:10:40




