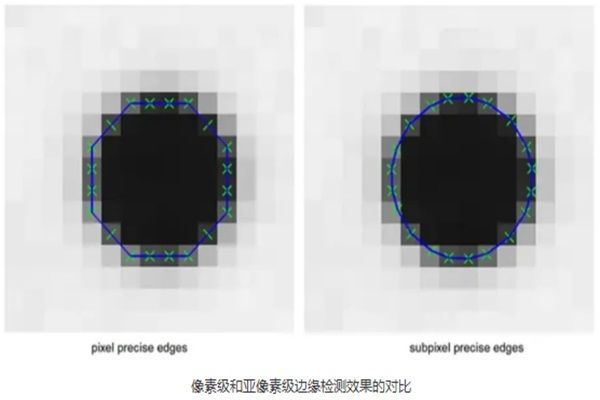
像素是图像传感器采集信息的最小单元,每个像素只能记录一个数值,就是落在该区域内的光的平均强度。至于光线是从哪个方向来的、落在像素的哪个具体位置上,像素本身无法区分。 这就产生了一个基础性问题,当一条边缘穿过像素时,我们只能确定它在像素内部,却无法知道它的精确坐标。亚像素边缘检测技术要解决的正是这个问题,它不改变硬件,不提高相机分辨率,而是通过数学方法从像素的灰度值中推算出边缘在像素内部的精确位置。 一、为什么像素级边缘检测“不够用” 边缘检测是 机器视觉...
2026-07-02 17:45:34